체조 도마 손 짚고 옆 돌아 몸 펴 뒤 공중 돌며 1260도 비틀기(YANG Hak Seon 2) 동작의 운동학적 분석
The Kinematic Analysis of Tsukahara Stretched with 7/2 Turn(YANG Hak Seon 2) in Vault
Article information
Abstract
이 연구는 YHS 선수에 의해 새롭게 개발된 가칭 YANG Hak Seon 2 동작의 성공적인 동작과 세 가지 유형의 실패 동작(T1: 뒷걸음치다 넘어짐, T2: 주저앉음, T3: 옆으로 넘어짐)의 특성을 분석하여 동작의 완성도를 높이는데 필요한 정량적 자료를 제공하는데 목적이 있다. 이를 위해 고속카메라를 이용한 3차원 영상분석을 통해 운동학적 특성을 비교·분석한 결과 다음과 같은 결론을 얻었다.
첫째, 성공 동작은 다른 실패 동작들에 비해 대퇴 회전과 동체 회전 거리를 크게 하면서 착지각을 65°로 가장 크게 확보하였으며, 비틀기 회전속도가 빠르게 지속됨에도 불구하고 왼쪽 견관절을 크게 벌리면서 관성모멘트를 크게 하여 착지의 안정을 취하였다.
둘째, 실패 동작들은 착지 시 동체의 회전과 비틀기 각을 완전하게 확보하지 못하는 매우 불안정한 착지 동작을 유발하였다. 도마 접촉 국면 동안 신체의 굴곡된 자세로 인해 도마 이륙 직후에 발생하는 정 방향의 비틀기의 추진력을 제대로 얻지 못하였다. 이는 제 2비약 국면에서 원활하지 못한 동체의 회전속도가 이루어져서 Peak 시 신체 회전각을 충분히 확보하지 못함으로써 하강 시 비틀기 운동에 치중할 수 없었던 결과로 사료된다.
Trans Abstract
The research was a case study conducted in order to develop a new technique “YANG Hak Seon 2” for YHS athlete. A comparative kinematical three dimensional video analysis was performed with the use of high speed cameras. One successful trial and three of failure trials (T1: Falling backward while landing, T2: sitting reluctantly while landing, T3: Falling of sideways while landing). The result obtained from the study are as follows.
Firstly when comparing the successful operation of the technique with failure trials, relatively higher landing angle was secured through increasing the thigh rotation and the body’s rotational velocity. Furthermore, despite increase in rotational velocity at twisting, stable landing was achieved through increasing the moment of inertia by spreading the left shoulder. Secondly, in case of failure trials while taking off the board, the thigh rotational angular velocity was comparatively less which ultimately affected the body position in the next phase of approach to the vault.
Thus, due to the affected body position the athlete was not able to utilize the proper momentum of twist in positive direction Hence, it is considered that the velocity of center of mass might have also effected the operation not only the velocity while approaching the board.
서론
연구의 필요성
기계체조 경기종목 중 도마는 두 발 모아 발 구름을 하여 양손을 도마에 짚고 뛰어 넘으면서 공중회전 및 비틀기를 한 후 착지에 이르는 동작을 평가하는 경기이다. 도마 경기는 단일 기술의 연기에 대해서만 채점하는 것이며, 연기에 대한 최종점수는 기계체조의 다른 종목과 마찬가지로 D(난도, difficulty)점수 및 E(실행, execution)점수로 구분하여 평가하고 이를 합산하는 방식을 택하고 있다. 특히 도마 종목은 단일 기술의 연기에 대해 각 각 평가하기 때문에 경기 승패를 좌우하는데 있어서 연기 내용에 대한 점수인 D점수가 결정적 역할을 한다.
2011년부터 2012년까지 체육과학연구원(현, 한국스포츠개발원)은 2012 런던올림픽을 대비해서 당시 세계 최고의 기술이었던 YHS 선수의 YANG Hak Seon 동작을 분석(송주호 등, 2011)하여 YANG Hak Seon 동작의 착지 시 앞으로 넘어졌을 때, 뒤로 넘어졌을 때, 성공했을 때 등 각 유형별 성공과 실패 원인을 분석하여 기술의 완성도를 높이는데 주력하였다. 이러한 지원 과정을 통해 마침내 YHS 선수는 2012년 런던올림픽대회 기계체조 남자 도마 결승경기에 출전해 16.533점이라는 역대 최고의 점수를 획득하며 올림픽 참가 52년 만에 첫 금메달을 목에 걸었다.
2012 런던올림픽이 끝난 직후 개정된 채점규칙(FIG, 2013) 중 도마경기의 D점수는 2012 런던올림픽에서 YHS 선수가 구사했던 YANG Hak Seon 기술은 7.4점에서 6.4점으로, Lopez 기술은 7.0점에서 6.0점으로 하향 조정되었고, 런던올림픽 이후 강력한 경쟁상대로 떠오른 북한의 리세광 선수의 Ri Se Gwang 기술은 7.4점에서 6.4점으로, Dragulescu piked 기술은 7.2점에서 6.4점으로 하향 책정되었다.
이와 같이 개정된 규칙에서 YHS 선수의 두 가지 기술을 합산한 D점수가 리세광 선수에 비해 0.4점이나 뒤지는 D점수는 경기 승패에 결정적인 영향을 미치게 된다. 따라서 YHS 선수는 D점수를 올리지 않으면 안 되기 때문에 고난도의 새로운 기술을 개발해야만 하는 절박한 상황에 처하게 되었다.
YHS 선수가 구사하고 있는 두 가지 다른 유형의 기술은 도마 손 짚고 넘기의 형태(손 짚고 앞돌기와 손 짚고 옆 돌기)가 서로 달라서 기술 요소그룹이 구분되었을 뿐 도마 이륙 후 공중회전운동은 동일한 형태를 취한다는 특징이 있다. 따라서 리세광 선수에 견줄만한 기술을 개발하기 위해서는 오직 제 2비약의 공중회전운동에서 180° 이상 비틀기 양을 늘리는 방법밖에 없었다.
Lopez 동작에서 180° 비틀기를 추가시킨 손 짚고 옆 돌아 몸 펴 뒤 공중 돌며 1260도 비틀기(tsukahara stretched with 7/2 turn, 이하 YANG Hak Seon 2 동작으로 사용) 동작의 경우 YANG Hak Seon 기술과 동일한 착지자세를 취하게 되어 착지의 안정성에는 다소 지장이 있을 수 있으나 D점수가 6.4점으로 높아짐으로써 리세광 선수와 동일한 조건에서 경쟁할 수 있게 된다.
가칭 YANG Hak Seon 2(이하 YANG Hak Seon 2라 한다) 동작과 같은 Tsukahara(손 짚고 옆 돌아 뒤 공중돌기) 계통의 기술들은 도마를 측면으로 돌아 넘을 때 신체가 180° 정도 역방향으로 비틀기를 한 후 뒤 공중돌기를 하면서 정 방향으로 비틀기를 한다.
YHS 선수가 구사하고 있는 YANG Hak Seon 2 동작은 도마를 측면으로 짚으면서 옆 돌아 넘을 때 역방향 비틀기가 1/4회전이 채 이루어지지 않으며, 이때부터 다시 정 방향의 비틀기로 전환되기 때문에 결과적으로 뒤 공중 돌며 세 바퀴 반(1260°) 비틀기라고 함은 실제로 뒤 공중 돌며 세 바퀴와 1/4 정도의 비틀기라고 할 수 있다. 이와 같은 이유로 YANG Hak Seon 2 동작은 YANG Hak Seon 기술보다 표면상 더 많은 비틀기 거리를 가짐에도 불구하고 YANG Hak Seon 기술과 동일한 난도(D점수 6.4점)로 취급된다.
YHS 선수의 YANG Hak Seon 2 동작은 정식대회인 2014년 코리아컵 국제체조대회에서 처음으로 성공하였으나 FIG가 주관하는 공식대회가 아니어서 정식 기술로 인정받지 못하였다. 그 후 2014년 난징세계선수권대회에서 YANG Hak Seon 2 기술을 시도하겠다는 의사를 FIG 기술위원회에 제출하여 난도 가치점을 6.4점으로 인정받은 상황에서 경기에 임했으나 경기 시 엉덩이로 주저앉음으로서 또다시 채점규칙집(Code of Point)에 등재되지 못했다.
박종훈과 송주호(2012)는 성공적인 YANG Hak Seon 동작 수행이 가능했던 이유는 주요국면인 제2비약 동안 체공 높이가 2.89 m를 유지하고 체공시간이 1.06 초로 충분히 유지되었으며, Peak 시 동체의 회전각이 469 도가 되도록 충분히 회전하면서 동체 비틀기의 회전속도가 1349 deg./s로 매우 빠르게 진행되었기 때문이라고 하였다.
YANG Hak Seon 2 동작은 YANG Hak Seon 동작과 마찬가지로 도마를 등지고 착지하기 때문에 착지의 안정을 취하기가 매우 어렵다. 또한 YANG Hak Seon 동작과는 달리 도마를 옆으로 손 짚고 이륙하며, 비틀기가 전환되는 까다로운 과정을 거치게 된다. 따라서 YANG Hak Seon 2 동작의 착지의 안정을 위한 제 2비약의 이동 경로와 신체의 움직임에는 다소 차이가 있을 수 있다.
이에 본 연구는 YANG Hak Seon 2 동작 시 도마 손 짚기 과정과 비틀기에 대한 부담을 극복하고 착지의 안정성을 확보할 수 있는 주요 변인과 특성을 파악하여 동작의 완성도를 높이는데 필요한 정량적 자료를 제공하는데 목적을 두었다.
연구방법
연구대상
본 연구의 대상은 2012 런던올림픽 도마 금메달리스트인 YHS 선수이며, YHS 선수의 신체적 특성은 신장 159 cm, 체중 52 kg, 나이 24세, 선수 경력 11년으로 2012 런던올림픽(1위), 11, 13 세계선수권대회(1위)의 경력을 가지고 있다.
실험절차
영상분석을 위한 촬영은 Photoron(JPN)의 Fastcam SA6 Model 72K C1, 고속카메라 3대를 이용하였다. <그림 1>에서 보는 바와 같이 구름판 측면(cam 3), 도마 정면기준으로 좌우측(cam 1, 2)으로 15 m 떨어진 지점에 카메라를 동조시켜 설치한 후 전역좌표계를 형성하기 위해 Visol의 통제틀(control point)을 이용하여 1×1×2 m, 1×1×4 m, 1×1×4 m의 직육면체 조형물 3개를 설치한 후 약 5초간 촬영하였다. 또한 조주 마지막 스텝을 분석하기 위하여 도마 좌측에 위치한 1×1×4 m을 도마 우측에 위치한 1×1×2 m의 2 m 좌측으로 옮겨 5초 간 촬영한 후 제거하였다. 본 연구의 자료 수집은 YHS 선수의 좋은 컨디션 시, 경기 상황과 유사한 환경(태릉선수촌 포디움에서 경기 매트 사용)에서 종단적 추적을 통해, 성공과 실패 유형을 선별하였다.

촬영도구의 배치
캘리브래이션 작업은 3대의 카메라에서 촬영한 두 개의 control objects 영상을 하나의 영상으로 합성한 후 DLT(direct linear transformation) 방식에 의하여 공간좌표계를 형성하였다. 카메라의 촬영 속도는 120Hz, 셔터 스피드는 1/500초이다(송주호 등, 2011).
용어 정의
o 지지시간 : 구름판에 발이 접촉하고 있는 시간 및 도마에 손이 접촉하고 있는 시간
o 체공시간 : 구름판 이륙 시부터 도마 접촉 시까지 걸린 제 1비약 시간 및 도마 이륙 시부터 매트 착지 시까지 걸린 제 2비약 시간
o 신체 회전 : 제 2비약 시 전후면상에서 일어나는 신체의 회전(salto or rotation)
o 비틀기 : 제 1비약, 도마 손 짚기 및 제 2비약 국면에서 수평면 상에서 일어나는 신체의 비틀기(turn or twist)
이벤트 및 국면 정의
본 연구의 이벤트와 국면은 <그림 2>에서 보는 바와 같이 설정하였다.
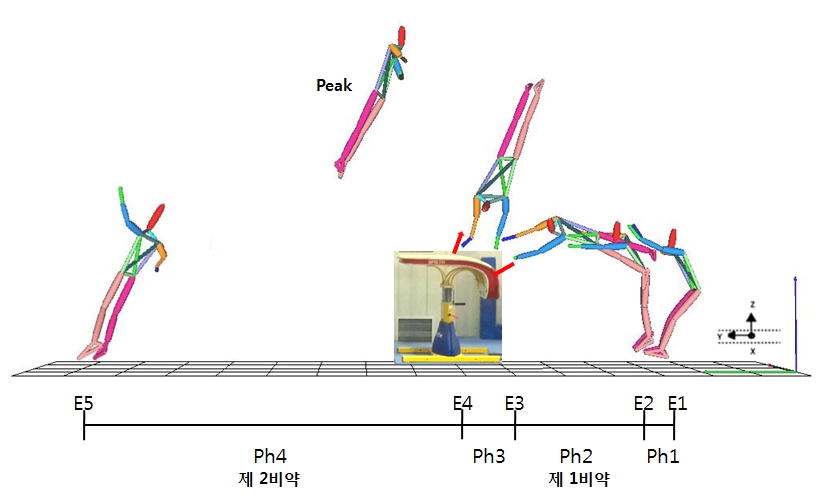
YANG Hak Seon 2 동작 시 이벤트 및 국면
o BTD(board touch-down) : 구름판에 발이 접촉하는 순간(E1)
o BTO(board take-off) : 구름판에서 이륙하는 순간(E2)
o HTD(horse touch-down) : 도마에 왼손이 접촉하는 순간(E3)
o HTO(horse take-off) : 도마에서 오른손이 이륙하는 순간(E4)
o 최고점(peak) : 제 2비약의 공중동작 중 신체중심이 최고 높이가 되는 순간
o LD(landing) : 착지 시 발이 매트에 접촉하는 순간(E5)
o BC(board contact) : 발이 구름판에 접촉하고 있는 발구름 국면(Ph1)
o PrF(pre-flight) : 구름판 이륙 시부터 도마에 왼손이 접촉 순간까지의 제1비약 국면(Ph2)
o HC(horse contact) : 양손이 도마에 접촉하고 있는 도마 접촉국면(Ph3)
o PoF(post-flight) : 도마에서 오른손 이륙 시부터 발이 매트에 접촉하는 순간까지의 제2비약 국면(Ph4)
분석요인
본 연구의 분석요인은 Takei, Y(1998, 2007)와 박종훈과 송주호(2012), 송주호 등(2011)의 선행연구를 근거로 소요시간, 국면별 신체중심의 위치 및 속도변화, 신체의 회전 위치에 따른 신체 분절과 관절의 각도<그림 3>, 각속도 변화 등을 분석하였다.

각도 정의
o 고관절각 : 대퇴와 동체가 이루는 상대 각도(1)
o 슬관절각 : 대퇴와 하퇴가 이루는 상대 각도(2)
o 견관절각 : 상완과 동체가 이루는 상대 각도(3)
o 구름판 지지각과 도약각 : YZ 평면으로 투영된 각으로 y축에 대한 두 발의 질량중심점의 중앙에서 신체중심점으로 향하는 벡터의 각도(4)
o 도마 지지각과 도약각 : 수평축에 대한 손의 질량중심점에서 신체의 질량중심으로 향하는 벡터의 각도(5)
o 대퇴 회전각 : 대퇴가 YZ평면으로 투영된 각도-y축과 이루는 절대각(6)
o 동체 회전각 : 동체가 YZ평면으로 투영된 각도-y축과 이루는 절대각(7)
o 동체 비틀기각 : 동체가 XY평면으로 투영된 각도(y축과 이루는 절대각)
자료 처리
본 연구의 영상자료 처리는 KWON3D 3.1(Kwon, 2002) 프로그램을 사용하였다. 자료처리과정은 통제틀(control objects)을 이용하여 실공간좌표를 계산한 후 인체의 3차원 좌표를 얻었다. 이 때 축 정의는 좌ㆍ우 방향을 X축, 운동 진행 방향인 전ㆍ후 방향을 Y축, 상ㆍ하 방향을 Z축으로 정의하였으며, 인체 모델은 총 21개의 관절점에 의한 16개의 신체 분절로 연결된 강체 시스템으로 정의하였다.
각각의 카메라로부터 얻은 2차원 좌표는 3차 스플라인 함수에 의한 보간법을 이용하여 동조하였으며, 3차원 좌표 계산은 Abdel-Aziz & Karara(1971)가 개발한 DLT (direct linear transformation)방식을 사용하였다. 또한 디지타이징 등과 같은 여러 가지 원인에 의해 발생되는 노이즈에 의한 오차 제거는 Butterworth 2차 저역통과 필터(low-pass filter)를 이용하여 스무딩하였으며, 이때 차단 주파수는 10Hz로 설정하였다(박종훈과 송주호, 2012).
결과
본 연구는 YHS 선수에 의해 새롭게 개발된 가칭 YANG Hak Seon 2 동작(손 짚고 옆 돌아 뒤 공중 돌며 세 바퀴 반 비틀기, Tsukaha stretched. with 7/2 turn)을 분석하기 위해 송주호 등(2011)이 연구한 YANG Hak Seon 기술(Handspring fwd. and salto fwd. str. with 3/1 turn)과 이순호 등(2012)이 연구한 Lopez 기술(Tsukaha stretched. with 3/1 turn)의 결과를 토대로 비교하였으며, YANG Hak Seon 2 동작은 성공적인 동작과 실패 동작의 세 가지 유형(T1: 뒷걸음치다 넘어짐, T2: 주저앉음, T3: 옆으로 넘어짐)을 주요 변인별로 비교·분석하였다.
소요 시간
<표 1>에 나타난 결과에 의하면, 도마 연기의 주요국면이며 비틀기 회전거리를 증가시키는데 결정적으로 영향을 미치는 제 2비약(PoF) 국면의 체공시간에서 성공 동작과 실패 동작 대부분이 Lopez 동작보다는 길고 YANG Hak Seon 동작과는 동일하게 1.06초로 나타났다.

국면별 소요시간
(단위: sec)
구름판 지지(BC)시간은 성공 동작이 0.11초, 실패 동작 모두 0.1초를 나타냈으며, 제 1비약(PrF)의 체공시간에서 성공 동작은 0.07초를 나타냈으며, 실패 T1과 T3 동작은 0.1초로 가장 길게, 실패 T2 동작은 0.06초로 가장 짧게 나타났다. 또한 도마 지지(HC)시간은 성공 동작이 0.19초를 나타냈고 실패 T2 동작이 0.22초로 가장 길게 나타났다.
특히 도마에 접촉하는 양손의 지지 시간차는 성공 동작이 0.05초로 나타났으며, 실패 T1 동작이 0.03초로 가장 짧게, 실패 T2 동작이 0.07초로 가장 길게 나타났다. 또한 도마에서 이륙하는 양손의 이륙 시간차는 성공이 0.03초로 나타났으며, 실패 T1과 T3 동작은 0.02초로 가장 짧게, 실패 T2 동작은 0.04초로서 가장 길게 나타났다.
위치 변화
신체중심의 위치 변화
본 연구에서 좌표계의 기준점은 발구름 시 신체중심선의 하단 마룻바닥의 위치로 설정하였다.
YANG Hak Seon 2 동작은 체공 높이가 YANG Hak Seon 동작과 Lopez 동작보다 높은 반면 착지높이는 매우 낮은 특징을 보였다. 발구름 국면에서는 Lopez 동작과 유사한 수직운동 패턴을 보였으나 Lopez 동작 보다 더 큰 수평중심의 신체 이동을 보이기도 했다.
또한 YANG Hak Seon 2 동작의 성공 동작은 YANG Hak Seon 동작에서와 같이 발구름 국면에서 수평중심으로 신체를 크게 전방 이동하였으며, 제 2비약의 체공 높이가 가장 높은 특징을 보였다.

신체중심의 수직위치
(단위: m)

신체중심의 수평위치
(단위: m)
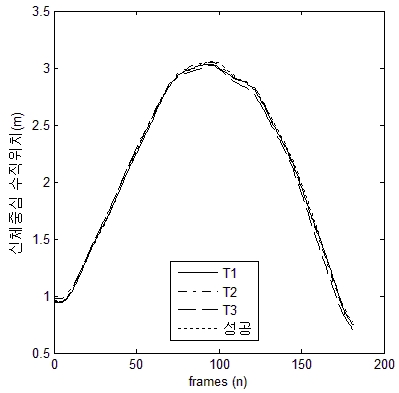
신체중심의 수직위치 변화

신체중심의 수평위치 변화
반면 실패 동작은 발구름 이후부터 전반적으로 신체가 전방으로 쏠리는 현상을 보였다. 특히 실패 T1 동작은 구름판 이륙 높이가 낮고 도마 접촉국면에서 가장 크게 전방으로 밀리는 현상을 보였다.
실패 T2 동작은 실패 동작 중 도마 이륙 높이가 가장 높았으나 제 1비약의 수평변위가 짧고 도마 접촉 시 신체중심의 높이가 가장 낮은 결과를 보였다.
실패 T3 동작은 도마 접촉 시 신체중심이 가장 높은 것 외에 별다른 특징을 보이지 않았다.
주요 거리 요인
본 연구에서 도마 접촉 시 손 위치에 대한 좌표계의 기준점은 수평위치가 도마 앞쪽 끝 모서리 위치이며, 수직위치는 도마 하단 마룻바닥의 위치로 설정하였다.
<표 4>에 나타난 결과에 의하면, 발구름 직전의 도움닫기 마지막 스텝의 보폭은 성공 동작이 2.82 m로 가장 짧게 나타났고, 실패 T1과 T3 동작이 각각 3.01 m과 3.02 m로서 가장 길게 나타났다. 또한 왼손(첫 번째)이 도마를 짚는 위치는 수평위치의 경우 성공 동작이 0.08 m로서 가장 가까운 것으로 나타났고 실패 T2 동작이 0.19 m로서 가장 먼 것으로 나타났으며, 오른손(두 번째)이 도마를 짚는 위치는 수평위치의 경우 성공 동작이 0.47 m로서 가장 가까운 것으로 나타났고 실패 T2 동작이 0.82 m로서 가장 먼 것으로 나타났다.

주요 거리요인
(단위: m)
도마 손 짚기 시 양손의 간격은 성공 동작이 0.38 m로 가장 좁게 나타났으며, 실패 T2 동작이 0.5 m로 가장 넓게 나타났다.
이와 같은 결과에 의하면, 성공 동작의 경우 도움닫기의 마지막 스텝을 짧게 하면서 발구름 동작을 취하였으며, 첫 번째 손(왼손)이 도마 맨 앞쪽 모서리 부분을 짚고 양손 간격을 좁히면서 다음 손(오른손)을 짚는 것으로 나타났다. 반면 실패 T2 동작은 첫 번째 손이 다른 시기보다 멀리 짚고 양손을 크게 벌리고 있으며, 블로킹 동작을 취할 때 가장 크게 힘이 받는 오른팔의 손이 가장 멀리 짚이는 것으로 나타났다.
실패 T3 동작은 첫 번째 손이 비교적 가깝게 도마 앞쪽 모서리 부분을 짚고 있으나 다음 손이 비교적 멀리 짚는 특징을 보였다.
속도 변화
YANG Hak Seon 2 동작은 Lopez 동작보다 Peak 높이에서부터의 하강속도가 빠르게 나타난 반면 착지 순간의 수직속도는 매우 느린 특징을 보였다.

신체중심의 수평속도
(단위: m/s)

신체중심의 수직속도
(단위: m/s)
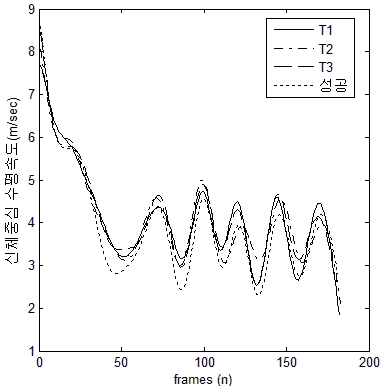
신체중심의 수평속도 변화
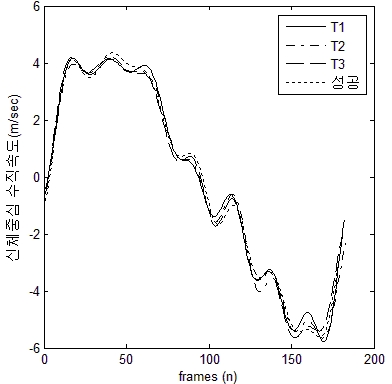
신체중심의 수직속도 변화
특히 성공 동작은 매우 빠르게 구름판에 접근하였고, 도마 위로 빠르게 뛰어오르고 있다. 또한 성공 동작은 도마 이륙 시 실패 동작들보다 느린 수평속도를 보였지만 수직 상승속도는 가장 빠르게 나타났다.
이와 같이 성공 동작은 준비국면에서 형성된 수평중심의 운동을 도마 손 짚기 과정에서 적절하게 수직운동으로 전환시킨 경우로 볼 수 있다.
한편 실패 T1 동작은 구름판 접근 속도가 매우 느렸고, 발구름 국면에서의 감속도는 가장 적으로 것으로 나타났으며, 구름판 이륙속도는 빠르게 나타났지만 도마를 이륙하는 수직 상승속도는 가장 느린 결과를 나타냈다.
실패 T2 동작은 구름판에서의 이륙속도는 가장 느렸으나 도마에 접근하는 속도는 매우 빠르게 나타남으로서 수평중심의 제 1비약 운동이 이루어지고 있음으로 사료된다.
실패 T3 동작은 구름판 이륙속도를 빠르게 하여 수직중심의 제 1비약 운동을 이루고 있으나 도마를 이륙할 때와 제 2비약의 공중회전운동 국면에서 매우 빠른 수평중심의 전방 진행속도를 나타내고 있다.
각도 변화
주요관절의 각도변화
YANG Hak Seon 2 동작은 성공과 실패 동작 모두 고관절과 슬관절각이 구름판을 이륙할 때는 Lopez 동작보다 크게 신전되었으며, 도마를 접촉할 때의 고관절각은 Lopez 동작보다 작은 각을 유지하였다.

주요관절의 각도 변화
(단위: deg.)
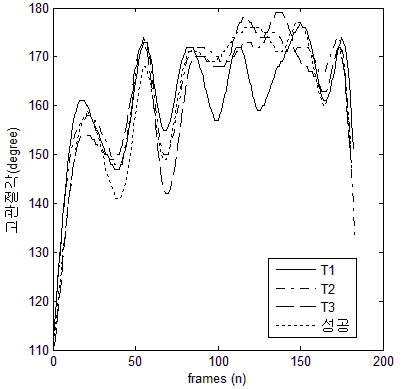
고관절 각도 변화
슬관절 각도 변화

견관절(L,R) 각도변화
또한 성공과 실패 동작 모두 도마 손 짚기와 공중회전운동 동안 Lopez 동작보다 고관절은 작게 유지하였으나 슬관절각은 크고 곧게 유지하였다.
착지 순간 실패 T2 동작을 제외한 대부분의 동작이 Lopez 동작보다 고관절각은 크고 슬관절각은 작게 나타났다. 특히, YANG Hak Seon 2 동작은 성공과 실패 동작 모두 구름판을 이륙하는 시점부터 도마를 이륙하는 동안 YANG Hak Seon 동작보다 견관절각을 작게 유지하는 것으로 나타났고, 공중회전운동 동안 YANG Hak Seon 동작보다 견관절각을 크게 유지하였으며, 착지 직전부터 YANG Hak Seon 동작보다 견관절각이 다시 작아지는 특징을 보였다. 한편, YANG Hak Seon 2 기술의 성공 동작은 구름판 이륙 시 견관절각과 도마 이륙 시 블로킹에 영향을 주는 우측 견관절각이 다른 실패 동작들보다 크게 나타났으며, 공중회전운동 동안 견관절각이 매우 작게 유지하였다가 착지 직전 다시 크게 신전시키는 것으로 나타났다.
실패 T1 동작은 도마 이륙직전까지의 준비국면에서 고관절각을 가장 크게 유지하였으며, 착지 순간 고관절각과 슬관절각을 가장 크게 유지하였다. 또한 도마를 접촉할 때 첫 번째로 짚는 좌측 팔의 견관절각이 상대적으로 매우 작은 특징을 보였다.
실패 T2 동작은 제 2비약의 공중회전운동 동안 고관절과 슬관절각을 크게 하면서 신체를 곧게 잘 유지시키고 있으나 착지 시 고관절각과 슬관절각이 매우 작아지는 결과를 나타냈다.
실패 T3 동작은 도마를 넘어가는 과정의 준비국면에서 고관절각이 가장 작게 나타났으며, 그 준비국면에서 슬관절의 굴신 폭이 상대적으로 크게 나타났다. 또한 착지 시 좌측 견관절각이 가장 작게 나타나는 특징을 보였다.
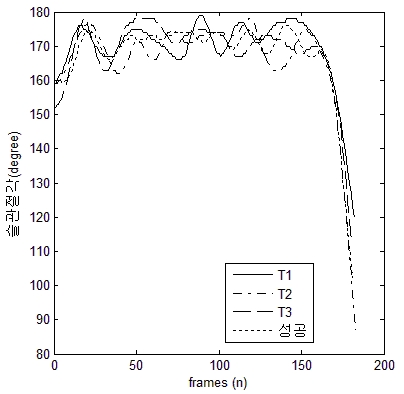
구름판과 도마 지지각 및 착지각 변화
YANG Hak Seon 2 동작은 Lopez 동작보다 구름판 이륙각이 크게 나타난 반면 도마 이륙각이 작은 특징을 보였다.

구름판과 도마 지지각, 착지각
(단위: deg.)
성공 동작의 구름판 이륙각은 Handspring 계통의 동작인 YANG Hak Seon 동작과 동일한 각도를 유지하였으며, 다른 실패 동작들보다 착지각이 다소 크게 나타나는 특징을 보였다.
실패 T1 동작은 착지각이 Lopez 동작과 동일하게 유지되었음에도 불구하고 뒷걸음치다 넘어지는 결과를 보였는데 이는 이상적인 착지각이 유지되었다고 하더라도 또 다른 변인이 영향을 줄 경우 착지의 안정성이 달라질 수 있음을 설명해 주고 있다. 실패 T2 동작은 도마 접촉 시 신체각과 착지각이 매우 작은 결과를 나타냈으며, 실패 T3 동작은 구름판 이륙각과 도마 이륙각이 가장 작은 특징을 나타냈다.
대퇴 회전각 변화
YANG Hak Seon 2 동작은 YANG Hak Seon 동작보다 HTD 시 대퇴 회전각은 작은 반면 HTO 시 대퇴 회전각은 크게 나타났다.

대퇴 회전각
(단위: deg.)

대퇴 회전각도 변화
YANG Hak Seon 2 동작은 Peak 시와 착지 시 전반적으로 YANG Hak Seon 동작보다 작은 각을 보였다. 특히 YANG Hak Seon 2의 성공 동작은 구름판을 이륙할 때 다리를 뒤로 빠르게 차주었고, 공중회전운동 동안 최고 높이에 이를 때까지 YANG Hak Seon 동작과 거의 유사하게 매우 많은 회전거리를 확보하였으며, 착지에서도 YANG Hak Seon 동작과 거의 유사한 대퇴 회전거리를 확보한 것으로 나타났다.
반면 실패 T1 동작은 구름판 이륙과 도마 접촉에 이를 때 매우 큰 각변위를 보였으나 도마를 이륙하면서부터 크게 둔화하는 현상을 나타냈다.
실패 T2 동작은 구름판 이륙에서부터 도마에 접근하는 과정 동안 대퇴 회전운동이 원활히 이루어지지 않았으며, 착지에서도 매우 작은 대퇴 회전각을 나타냈다.
실패 T3 동작은 도마 이륙 순간 다리를 세차게 차주지 못하였고, 도마를 이륙할 때의 대퇴회전각이 가장 작은 결과를 보였다.
동체 회전각 변화
YANG Hak Seon 2 동작은 도마를 이륙한 후 착지에 이르는 공중회전운동 동안 Lopez 동작보다 동체 회전 각변위를 크게 하는 특징을 보였다.
성공 동작은 구름판 이륙 시 상체가 많이 숙여져 있으며, 도마를 이륙할 때에는 동체의 회전각이 그다지 크지 않았으나 신체중심이 최고 높이에 이를 때와 착지 순간에 가장 큰 각변위를 나타냈다.
실패 T1 동작은 도마를 이륙할 때 가장 큰 각변위를 보였으나 이후 공중회전운동 중 최고 높이에 이르는 동안 원활한 각운동이 이루어지지 않는 모습을 보였으며, 실패 T2 동작은 도마에 접근할 때부터 동체의 회전거리를 크게 확보하지 못하고 공중회전운동에서 착지에 이르는 동안 가장 작은 각변위를 이루는 결과를 보였다.
실패 T3 동작은 도마를 접촉하는 순간 가장 큰 동체 회전각을 유지하였으나 도마를 이륙하는 순간 가장 작은 동체 회전각이 나타나는 특징을 보였다.

동체 회전각
(단위: deg.)
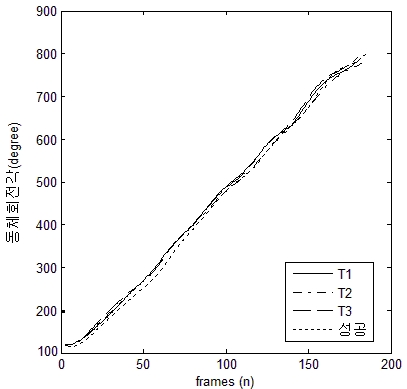
동체 회전각도 변화
동체 비틀기각 변화
YANG Hak Seon 2 동작의 성공과 실패 동작 모두 구름판을 이륙할 때부터 Lopez 동작보다 역방향으로의 비틀기 각변위를 크게 하였으며, 착지 방향이 동일한 YANG Hak Seon 동작보다 더 충분한 비틀기 거리를 확보한 것으로 나타났다.

동체 비틀기각
(단위: deg.)

동체 비틀기각도 변화
YANG Hak Seon 2 동작은 도마를 이륙할 때 Lopez 동작보다 역방향으로의 비틀기 각변위를 크게 하였을 뿐만 아니라 신체중심이 제 2비약의 최고 높이에 이를 때 실패 T1 동작을 제외한 대부분이 Lopez 동작보다 정 방향으로의 비틀기 각변위가 큰 결과를 나타냈다.
YANG Hak Seon 2 동작 또는 Lopez 동작은 역방향으로 180° 회전하면서 손 짚고 옆 돌아 넘기(측전)를 하고, 제 2비약 시 정 방향으로 되돌아오면서 비틀기를 시작하기 때문에 비틀기 운동 시작 시점의 신체 방향이 YANG Hak Seon 동작과는 정 반대가 된다. 따라서 YANG Hak Seon 2 동작은 YANG Hak Seon 동작보다 반 바퀴(180°) 더 비틀기가 이루어진다고 하더라도 착지방향은 도마를 등지면서 YANG Hak Seon 동작 동일하게 된다(Lopez 동작과는 정 반대임).
성공 동작은 도마 접촉 국면에서 역방향으로 가장 많이 비틀기를 한 후 정방향의 비틀기로 전환되었음에도 불구하고 Peak 시 가장 큰 정방향의 비틀기각을 이루는 특징을 보였다. 실패 T1 동작은 도마 손 짚기 과정에서 역방향으로의 비틀기 운동이 소극적이었고 비틀기 전환시점의 비틀기각이 가장 적었음에도 불구하고 Peak 시 정방향의 비틀기 각변위가 가장 작은 결과를 보였다. 또한 실패 T2 동작은 비틀기 전환시점의 비틀기각이 가장 작았을 뿐만 아니라 착지 시 충분하지 못한 비틀기각을 나타냈으며, 실패 T3 동작은 도마 접촉 국면에서 가장 원활한 역방향 비틀기 운동이 이루어진 반면 도마 이륙 후 Peak 시점까지의 정방향 비틀기 회전운동에서는 그다지 좋을 결과를 얻지 못하는 것으로 나타났다.
각속도 변화
대퇴 회전 각속도 변화
YANG Hak Seon 2 동작은 YANG Hak Seon 동작보다 도마 접촉 국면과 도마를 이륙할 때만 대퇴 회전 각속도가 빠른 것으로 나타났다.

대퇴 회전 각속도
(단위: deg./s)
대퇴 회전 각속도 변화
제 1비약과 제 2비약의 회전운동 동안에는 YANG Hak Seon 동작보다 느린 것으로 나타났다. 또한 착지 순간 YANG Hak Seon 2 동작은 YANG Hak Seon 동작과는 달리 대퇴 분절이 빠르게 역회전하는 특징을 보였다. 또한 성공과 실패 동작 모두는 구름판을 이륙할 때부터 도마를 이륙할 때까지의 손 짚고 넘기 과정에서 대퇴 회전 각속도가 YANG Hak Seon 동작보다 매우 적게 감속되는 특징을 보였다.
성공 동작의 경우 제 1비약과 제 2비약의 회전운동 동안 YANG Hak Seon 동작에 근접하는 각속도 값을 보였고, 도마를 이륙하는 준비국면에서 가장 빠른 대퇴 회전 각속도를 보였다.
한편 실패 T1 동작은 도마를 넘어가는 손 짚기 과정에서 오른다리를 빠르게 차주지 못하고 제 2비약의 상승 국면에서도 대퇴 회전운동이 원활하지 못하는 결과를 보였다.
실패 T2 동작은 도마를 이륙할 때 왼다리의 회전이 미흡하였고, 착지 시 매우 빠른 역회전이 나타났으며, 실패 T3 동작은 제 1비약과 도마 접촉 국면에서 원활하지 못한 대퇴 회전이 이루어졌음에도 불구하고 제 2비약의 공중회전운동 동안 가장 빠른 대퇴 회전속도를 유지하는 것으로 나타났다.
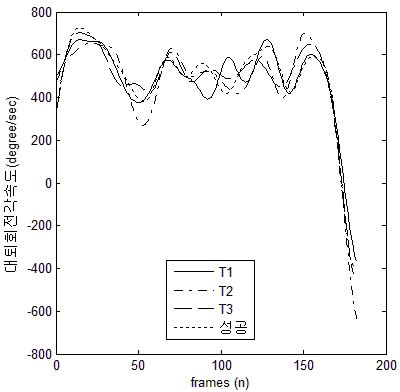
동체 회전 각속도 변화
YANG Hak Seon 2 동작의 경우 성공과 실패 동작 모두 Lopez 동작보다 발구름에서의 동체 회전은 느리게 진행되었으나 상체를 빠르게 숙이면서 도마에 접근하였다.

동체 각속도
(단위: deg./s)

동체 회전 각속도 변화
제 1비약과 제 2비약의 상승 국면 동안 Lopez 동작보다 동체의 회전운동을 빠르게 수행하는 것으로 나타났다. 특히 성공 동작은 발구름 국면과 제 2비약의 상승 국면에서 다른 실패 동작들보다 매우 빠르게 회전하는 특징을 보였으며, 실패 T1 동작은 발구름과 제 1비약 국면에서는 동체의 회전이 가장 느리게 이루어졌으나 도마를 이륙할 때와 착지 순간에는 동체가 가장 빠르게 회전하는 것으로 나타났다. 실패 T2 동작은 제 2비약의 공중회전운동 동안 동체의 회전이 가장 느리게 수행되었을 뿐만 아니라 착지 순간에도 매우 느린 결과를 보였다. 실패 T3 동작은 동체가 가장 빠르게 회전하면서 도마에 접근하였으나 도마를 이륙할 때는 가장 느리게 회전하는 모습을 나타냄으로서 손 짚기 국면에서 동체의 회전속도가 가장 크게 감속하는 현상을 보였으며, 동체가 매우 빠르게 회전하면서 착지에 이르는 특징이 나타났다.
동체 비틀기 각속도 변화
YANG Hak Seon 2 동작의 성공과 실패 동작은 모두 제 2비약의 공중회전운동 동안 YANG Hak Seon과 Lopez 동작보다 매우 빠른 비틀기 회전속도를 보였다.

동체 비틀기 각속도
(단위: deg./s)
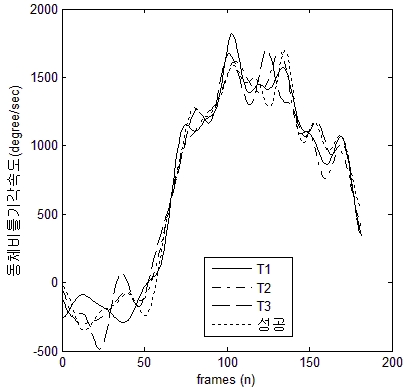
동체 비틀기 각속도 변화
Peak 시에도 실패 T1 동작을 제외한 대부분의 동작이 YANG Hak Seon과 Lopez 동작보다 빠르게 비트는 결과를 보였다. 특히 성공 동작은 신체중심이 제 2비약의 최고 높이에 이를 때와 제 2비약의 하강 국면에서 가장 빠른 비틀기 회전속도를 보이면서 착지 순간에도 지속되는 것으로 나타났다.
실패 T1 동작은 Peak 시와 착지 순간 동체의 비틀기 회전속도를 가장 느리게 유지하였음에도 불구하고 제 2비약의 공중회전운동 동안 평균 비틀기 회전속도가 가장 빠른 것으로 나타났다.
실패 T2 동작은 Peak 시까지 상승국면의 비틀기 회전속도는 비교적 빠르게 진행되었으나 이후 하강 국면에서부터 가장 느리게 회전하는 결과를 보였다.
실패 T3 동작은 제 2비약의 하강 국면에서 최고로 빠른 비틀기 회전속도를 보였으며, 제 2비약의 전체 평균 비틀기 각속도 또한 가장 빠른 것으로 나타났다.
논의
YANG Hak Seon 2 동작을 수행하는데 있어서 난도점수 6.4점 기술로 인정받기 위한 1차적인 문제는 Lopez 동작보다 180°의 비틀기 회전거리를 늘려야만 하는 것이며, 이를 위해서는 YANG Hak Seon 동작과 Lopez 동작보다 더 긴 체공시간의 확보와 더 빠른 비틀기의 회전속도를 가져야만 한다. 설령 비틀기 회전거리가 충분히 확보되었다고 하더라도 빠른 비틀기를 수행하는 과정 속에서 어떻게 해야만 안정된 착지자세를 이룰 수 있느냐가 매우 중요하다.
YANG Hak Seon 2 동작의 완수를 위해 특별히 요구되는 제 2비약의 체공 시간과 체공 높이 그리고 공중회전과 비틀기의 회전속도에서 성공 동작은 체공 시간이 1.06초로서 YANG Hak Seon 동작과 동일한 시간을 소비하였으며, 체공 높이는 3.06 m, 비틀기의 회전속도는 1,058°/s로서 YANG Hak Seon 동작과 Lopez 동작보다 더 높고 빠르게 수행하였다. 또한 YANG Hak Seon 2 기술의 성공 동작은 동일하게 도마를 등지면서 착지하는 YANG Hak Seon 동작에 비해 견관절각과 대퇴 회전 각변위가 작기는 하지만 충분한 비틀기를 가지면서 비교적 안정되게 앞으로 한 발만 움직인 착지하였다. 다른 실패 동작들에 비해 대퇴 회전과 동체 회전 각속도를 크게 하면서 착지각을 65도로 비교적 높게 확보하였으며, 비틀기 회전속도가 빠르게 지속됨에도 불구하고 왼쪽 견관절을 크게 벌리면서 관성모멘트를 크게 하여 착지의 안정을 취하였다.
한편, 박철희와 김영관(2014)의 YANG-2 동작 분석 결과에 의하면 제 2비약의 체공시간이 1.09초, 제 2비약의 최고 높이가 2.74 m, 착지 높이가 0.7 m로 나타났다. 이는 본 연구 결과인 YANG Hak Seon 2 동작보다 제 2비약의 체공시간은 길었으나 체공높이는 낮고, 착지 높이도 낮은 것이다. 또한 착지 시 신체(착지)각을 제시하지 않아서 확실한 착지자세를 가늠하기 어려우나 고관절각도가 171도를 나타낸 것으로 보아 신체를 곧게 뻗으면서 착지한 것으로 여겨진다. 이처럼 착지 높이가 낮음에도 불구하고 신체를 곧게 뻗은 상태로 도마를 등지고 착지하게 되면 실제 포디움에서의 전습 및 경기상황에서는 필시 뒤로 넘어지게 될 것이다. 만약 박철희와 김영관(2014)의 선행연구 결과가 성공한 YANG-2 동작을 분석한 자료라면, 실험 장면에서 볼 수 있듯이 평소의 연습 때처럼 비트위에다 정식 기구설치 규정보다 착지매트 높이를 낮게 하여 스폰지매트를 설치하였기 때문으로 사료된다. 이와 같은 실험상황은 연기에 임하는 선수의 마음을 편안하게 하고 착지 순간의 충격요소를 제거한 것으로서 선수의 심리적 안정감을 줄 수 있을 뿐만 아니라 체공 시 최고높이가 상대적으로 낮게 나타난 결과와 같이 도약력이 떨어졌음에도 불구하고 체공 시간을 길게 유지할 수 있게 하며, 푹신푹신한 비트위에 설치된 스폰지매트의 영향으로 착지 이후에도 신체의 하강운동과 회전관성이 어느 정도 지속되어 도약력이 떨어지거나 신체의 회전이 부족한 동작을 완수하는데 도움을 줄 것이다. 따라서 경기상황과 동일한 기구설치와 실전훈련 환경이 조성된 상황에서 실험된 본 연구의 결과와 박철희와 김영관(2014)의 선행연구 결과를 비교하여 해석하는 데에는 무리가 있다.
신체의 착지각을 살펴보면, YANG Hak Seon 동작과 Lopez 동작은 각각 57°와 58°를 취하면서 이상적인 동작을 연출했다. 그러나 YHS2 기술의 성공 동작은 65°를 나타냈으며, 뒤로 주저앉거나 옆으로 넘어진 실패 동작은 모두 58° 이하로 나타나는 특징을 보였다.
착지 시 착지 불안요소로 작용하는 요인은 수평중심으로의 비행과 신체의 회전 및 비틀기가 될 것이며, 일반적으로 볼 때 수직 중심의 신체 이동과 신체의 회전 및 비틀기 속도가 느릴수록 착지의 안정감을 가져다 줄 것으로 생각하게 된다. 그러나 인간 한계에 도전할 만큼 빠르게 비틀기 운동을 수행하는 과정 속에서는 신체의 충분한 회전거리와 회전 속도가 받쳐주지 못할 경우 착지 순간 충격력이 가중되고 하지관절이 굽혀지는 결과로 이어져서 뒤로 넘어질 가능성이 높을 것으로 사료된다. 따라서 제 2비약 시 수평거리가 증가되지 않고 더 높은데서 하강하면서 최대한의 비틀기 운동을 일으키는 상황에서는 착지 순간까지 신체에 힘을 주기 위해서라도 신체의 회전운동과 비틀기 운동을 지속시키는 느낌으로 동작을 수행하여야만 할 것이다.
결론적으로 착지 시 신체의 회전각(착지각)은 YANG Hak Seon 동작보다 다소 큰 60° 정도 이상은 되어야 뒷걸음치지 않게 될 것이다. YANG Hak Seon 2 기술의 성공 동작은 동작 완수에 결정적인 영향을 미치는 제 2비약의 체공 시간이 Lopez 동작보다 길고 YANG Hak Seon 동작과 동일하게 나타났다. 체공 시간은 도약력과 직결되며, 도마 손 짚기에 의한 원활한 블로킹 동작은 도약력 상승에 결정적 영향을 미치고 있다.
YANG Hak Seon 2 동작은 YANG Hak Seon 동작과는 달리 도마를 측면으로 짚으면서 넘어가기 때문에 한 손(오른손)에 의존한 블로킹으로 인해 도약력이 약화된다는 단점이 있다. 또한 YANG Hak Seon 2 기술의 성공 동작은 도마 이륙각이 74°로서 YANG Hak Seon 동작과 Lopez 동작에 비해 매우 낮은 결과로서 신체가 수직에도 못 미치고 있으며, 견관절각을 신전(push-up)시키면서 동체 회전력 강화시키는 2차 추진 운동을 원활히 수행하지 못하는 것으로도 파악되었다.
이러함에도 불구하고 YANG Hak Seon 2 성공 동작은 제 2비약의 체공 높이가 3.06 m로 가장 높게 나타났다. 이는 발구름 직전의 마지막 스텝을 짧게 하면서 빠르게 구름판에 접근하여 강력한 발구름 동작을 취하였고, 구름판 접근 시 수평속도를 빠르게 하면서 도마에 달려드는 동작을 취하여 구름판 이륙각을 크게 하였으며, 양손의 간격을 좁혀서 도마 앞쪽 끝을 짚는 도마 손 짚기를 구사하면서 신체를 곧게 뻗어 준 상태로 YANG Hak Seon 동작의 대퇴회전 속도에 맞먹는 속도로 다리를 빠르게 차주었기 때문으로 생각된다. 특히 양손의 간격을 좁게 하고 빠른 대퇴의 회전속도는 비록 도마 이륙각이 낮았다고 하더라도 팔 관절이 무너지지 않게 만듦으로써 신체가 도마 위로 튀겨 오르는데 긍정적인 영향을 주었다고 생각된다.
특히, 발구름의 스피드와 도마 손 짚기의 응용, 그리고 강력한 대퇴 분절의 회전운동이 결합하여 도마에서의 탄성을 일으킨 결과로 이해될 수 있다. 또한 동작 완수를 위한 동체의 회전과 비틀기 거리를 충분히 확보하였으며, 제 2비약의 Peak 시 475(115)도로서 YANG Hak Seon 동작과 Lopez 동작보다 훨씬 큰 거리를 확보하였다. 이는 발구름과 도마 손 짚기 과정인 준비국면에서 파워 있는 점핑과 다리차기의 영향으로 보여 지며, Peak 시 신체가 세워져서 이미 수직상태를 넘어선 것으로서 동체의 비틀기 회전운동을 이롭게 할 것이다. 공중에서 회전과 비틀기 운동이 복합적으로 이루어질 때 머리가 위로 세워지면서 비틀기를 수행하는 것보다 아래로 떨어지면서 비틀기를 수행할 경우가 감각적으로 비틀기 운동을 훨씬 용이하게 할 수 있기 때문이다.
동체 비틀기의 경우 YANG Hak Seon 2 기술의 성공 동작은 제 2비약의 Peak 시 203°로서 YANG Hak Seon 동작보다 다소 작은 비틀기 각이 유지되었지만 신체 자세가 수직을 넘어서면서부터 매우 빠른 비틀기 회전이 이루어지는 특징을 보였다. 또한 Peak 시 YANG Hak Seon 동작보다 비틀기 거리가 작았던 이유는 도마 손 짚기 과정에서 역방향으로 많이 비틀었다가 되돌아오는 현상 때문으로 볼 수 있다.
YANG Hak Seon 2 동작, Lopez 동작과 같은 Tsukahara 계통의 기술에서 비틀기가 이루어질 경우 도마를 측면으로 짚으면서 옆 돌아 넘을 때 역방향으로 신체의 회전이 180° 이루어지지만 대부분 완전한 180° 회전이 이루어지지 않은 상태에서 정 방향 회전으로 전환되는 것을 볼 수 있다. 따라서 뒤 공중 돌며 세 바퀴 반 비틀기(1260°)라고 함은 실제로는 뒤 공중 돌며 세 바퀴와 1/4 정도의 비틀기가 이루어진다고 할 수 있다. 이러한 이유로 YANG Hak Seon 2 동작은 YANG Hak Seon 동작에 비해 1/4 정도의 비틀기만 추가해도 되기 때문에 큰 부담이 없다고 할 수 있다. 이러한 측면으로 볼 때 YANG Hak Seon 2 동작을 수행함에 있어서 도마 손 짚기 국면에서 90° 가까이 역방향으로 비틀기를 한 후 다시 정 방향으로 되돌아오는 데에는 큰 부담이 없는 것으로 보여 진다. 그러나 YANG Hak Seon 2 동작과 같은 Tsukahara 계통의 기술은 도마 손 짚기 국면에서 비틀기 거리가 부족할 경우 자칫 손 짚고 옆 돌기(tsukahara) 유형의 그룹으로 인정받지 못할 수 있기 때문에 180°에 가까운 충분한 역방향 비틀기를 수행할 필요가 있다. 그러나 이것도 YANG Hak Seon 2 기술의 성공 동작처럼 신체의 회전(salto)운동이 원활히 수행되었을 때만 가능한 것이다.
YANG Hak Seon 2 기술의 성공 동작은 착지 시 동체비틀기 각속도가 YANG Hak Seon 2 기술의 실패동작보다 상대적으로 빠르게 나타났다. 이는 도마 손 짚기 시 역방향 비틀기를 더욱 많이 진행하다가 정방향으로 전환됨에 따라 정방향의 비틀기량이 상대적으로 많기 때문에 동작 완수를 위해 제 2비약의 하강동안 비틀기 각속도를 빠르게 하고 착지 순간까지 지속시킨 결과로 생각된다.
YANG Hak Seon 2 기술의 실패 T1 동작은 착지 시 뒷걸음치다 뒤로 넘어진 동작이다. 이와 같은 실패 원인은 제 2비약의 공중회전운동 동안 비틀기 회전속도를 빠르게 수행하여 YANG Hak Seon 2 동작으로 인정할 만한 비틀기 거리를 확보하였지만 성공 동작에 비해 동체의 회전각과 신체의 착지각을 충분히 확보하지 못하였기 때문으로 생각된다. 특히 공중회전운동 동안 신체 자세가 수직에 이르는 Peak 시까지의 공중회전과 비틀기 운동이 원활하게 수행되지 못하였기 때문으로 여겨지며, 이는 구름판 접근 속도가 느렸을 뿐만 아니라 도마 이륙 시 대퇴 회전속도가 둔화됨으로써 도마 접촉 동안 신체가 전방으로 쏠려져서 신체중심의 이륙속도가 감소된 영향으로 이해된다.
YANG Hak Seon 2 기술의 실패 T2 동작은 착지 시 엉덩이로 주저앉은 동작이다. 실패 요인은 착지 시 고관절과 슬관절각을 매우 작게 유지하면서 전신의 착지각을 48°로 매우 작게 만들었기 때문으로 생각된다. 실패 T2 동작은 동작 완수에 결정적인 영향을 미치는 체공 시간이 상대적으로 길었으며, 체공 높이 또한 성공 동작과 거의 유사한 높이를 보이고 있다. 이러함에도 불구하고 착지 시 동체의 회전과 비틀기 각을 완전하게 확보하지 못하는 매우 불안정한 착지 동작을 유발하였다. 이는 공중 회전운동 동안 곧게 유지된 신체 자세로 인하여 관성모멘트가 커진 이유도 있겠지만 그보다 도마를 이륙하면서 동체의 회전속도를 빠르게 이루지 못한 결과로 보여 진다. 즉 구름판 이륙 직후 신체중심의 수평변위를 짧게 하고 도마 블로킹각을 낮게 하면서 수평중심으로 빠르게 도마에 접근하였고, 블로킹 동작을 위해 지지하는 오른 손을 멀리 짚음으로서 수평운동을 수직운동으로 전환시키는 동작을 이상적으로 수행하여 도마 이륙각과 이륙 높이를 키우기는 하였지만 구름판 이륙 속도가 다소 미흡하였으며, 구름판 이륙 시 다리 뒤차기(대퇴 회전) 운동을 소홀히 함으로서 도마 손 짚기 과정에서 동체의 회전운동이 원활히 수행되지 못하였기 때문이라고 할 수 있다. 또한 도마 이륙 시 이륙 높이와 이륙 속도가 좋았다는 것을 선수 자신이 직감하여 동체의 회전과 비틀기 운동을 수행함에 있어서 회전 속도를 조절하기 위해 순간적으로 아주 미세하게 몸의 힘이 풀리는 것과 같은 감각적인 여유를 부렸을 가능성도 전혀 배제할 수 없다. 많은 량의 비틀기 운동을 수행하기 때문에 조그마한 변화에도 결과에는 크나큰 영향을 주기 때문이다.
YANG Hak Seon 2 기술의 실패 T3 동작은 착지 시 회전하는 방향의 왼쪽 옆으로 넘어진 동작이다. 동체의 비틀기 회전이 하강국면에서 빠르게 전개되고, 왼쪽 견관절을 채 풀지도 못하면서 비틀기 회전 방향인 왼쪽으로 신체가 기울어진 것으로 나타났다.
이와 같이 하강 동안 비틀기 회전속도가 성공 동작과 유사하게 빨랐던 이유는 도마 이륙 시 도약력의 약화와 제 2비약 국면에서 수평중심으로 비행이 이루어짐으로서 동작의 완수를 위해 Peak 시 빠른 대퇴 회전운동을 통한 동체의 회전 거리 확보에 치중하다 보니까 미처 비틀기 회전각을 크게 확보하지 못하였기 때문으로 이해된다. 따라서 동작 완수를 위한 비틀기 각거리를 충분히 확보하기 위해 하강 시 매우 빠른 비틀기 회전이 필요했던 것이다.
결과적으로 좌측 견관절각의 신전을 통한 신체 움직임 제어 기능이 작동하지 못하여 착지의 불안을 초래한 것으로 보여 진다. 좀 더 구체적으로 파악해 보면, 실패 T3 동작은 구름판 이륙 높이가 높고 이륙속도가 빠르기는 하였으나 원활한 대퇴 회전운동이 동반되지 않아서 도마 접촉 국면 동안 동체의 회전속도가 크게 감속됨으로서 도마를 이륙할 때 도약력 상승에 실패하고 이후 수평중심의 신체 이동이 유발되었다고 보여 진다. 또한 도마 접촉 국면 동안 신체를 펴지 못한 자세로 인해 도마 이륙 직후에 발생하는 정 방향의 비틀기의 추진력을 제대로 얻지 못한 것으로 판단된다.
결론
본 연구는 YHS 선수에 의해 새롭게 개발된 가칭 YANG Hak Seon 2 동작(손 짚고 옆 돌아 뒤 공중 돌며 세 바퀴 반 비틀기, Tsukaha stretched. with 7/2 turn)의 안정성을 확보할 수 있는 주요 변인의 특성을 분석하고, 이를 통해 YANG Hak Seon 2 동작의 완성도를 높일 수 있는 방안을 찾아 훈련 현장에 제공하기 위해 실시되었다. 기술의 성공적인 동작과 세 가지 유형(T1: 뒷걸음치다 넘어짐, T2: 주저앉음, T3: 옆으로 넘어짐)으로 나타나는 실패 동작을 대상으로 고속카메라를 이용한 3차원 영상분석을 통해 운동학적 특성을 비교·분석한 결과 다음과 같은 결론을 얻었다.
첫째, 성공 동작은 다른 실패 동작들에 비해 도마 손 짚기 시 첫 번째 손(왼손)이 도마 맨 앞쪽 모서리 부분을 짚고 양손 간격을 좁히는 것으로 나타났고, 대퇴 회전과 동체 회전 거리를 크게 하면서 착지각을 크게 확보하였으며, 비틀기 회전속도가 빠르게 지속됨에도 불구하고 왼쪽 견관절을 크게 벌리면서 관성모멘트를 크게 하여 착지의 안정을 취하였다.
둘째, 실패 T1는 제 2비약의 공중회전운동 동안 비틀기 회전속도를 빠르게 수행하여 YANG Hak Seon 2 동작으로 인정할 만한 비틀기 거리를 확보하였지만 성공 동작에 비해 동체의 회전각과 신체의 착지각을 충분히 확보하지 못하였고, Peak 시까지의 공중회전과 비틀기 운동이 원활하게 수행되지 못하였다. 이는 구름판 접근 속도가 느렸을 뿐만 아니라 도마 이륙 시 대퇴 회전속도가 둔화됨으로 말미암아 도마 접촉 동안 신체가 전방으로 쏠려져서 신체중심의 이륙속도가 감소된 것으로 나타났다.
셋째, 실패 T2는 착지 시 고관절과 슬관절각을 매우 작게 유지하면서 전신의 착지각을 48°로 매우 작게 만들었기 때문이며, Peak 시 신체 회전각을 충분히 확보하지 못함으로써 하강 시 비틀기 운동에 치중할 수 없었던 결과로 사료된다.
넷째, 실패 T3은 구름판 이륙 높이가 높고 이륙속도가 빠르기는 하였으나 원활한 대퇴 회전운동이 동반되지 않아서 도마 접촉 국면 동안 동체의 회전속도가 크게 감속됨으로서 도마를 이륙할 때 도약력 상승에 실패하였고 이후 수평중심의 신체 이동이 유발된 것으로 사료된다.
References
박종훈(1999). 도마 손 짚고 옆 돌아 몸 굽혀 뒤 공중돌기 동작의 국면별 역학적 분석. 미간행 박사학위논문. 한국체육학교 대학원.
박 종훈. 1999;도마 손 짚고 옆 돌아 몸 굽혀 뒤 공중돌기 동작의 국면별 역학적 분석. 미간행 박사학위논문 한국체육학교 대학원;박종훈, 송주호(2012). 도마 YANG Hak Seon 동작의 운동학적 분석. 체육과학연구, 23(3), 702-717.
박 종훈, 송 주호. 2012;도마 YANG Hak Seon 동작의 운동학적 분석. 체육과학연구 23(3):702–717.박철희, 김영관(2014). 남자 체조 YANG-1과 YANG-2 도마 동작의 운동학적 비교. 한국운동역학회지, 24(4), 317-327.
박 철희, 김 영관. 2014;남자 체조 YANG-1과 YANG-2 도마 동작의 운동학적 비교. 한국운동역학회지 24(4):317–327.송주호, 이순호, 송홍선, 박종훈, 하철수(2011). 체조 도마 종목 고난도 신기술(손 짚고 몸펴 앞 공중돌아 1080도 비틀기) 종목의 완성도 향상을 위한 기술 분석. 국민체육진흥공단 체육과학연구원.
송 주호, 이 순호, 송 홍선, 박 종훈, 하 철수. 2011. 체조 도마 종목 고난도 신기술(손 짚고 몸펴 앞 공중돌아 1080도 비틀기) 종목의 완성도 향상을 위한 기술 분석 국민체육진흥공단 체육과학연구원.송주호, 문영진, 이상철, 박종훈, 하철수(2012). 2012런던올림픽 대비 체조 도마 종목기술의 실시간 피드백시스템 구축 및 활용을 통한 YANG Hak Seon 동작의 완성도 평가. 국민체육진흥공단 체육과학연구원.
송 주호, 문 영진, 이 상철, 박 종훈, 하 철수. 2012. 2012런던올림픽 대비 체조 도마 종목기술의 실시간 피드백시스템 구축 및 활용을 통한 YANG Hak Seon 동작의 완성도 평가 국민체육진흥공단 체육과학연구원.이순호, 박종훈, 이종훈(2006). 도마종목 Kasamatsu계의 Akopian 기술동작 분석. 한국운동역학회지, 16(1), 89-99.
이 순호, 박 종훈, 이 종훈. 2006;도마종목 Kasamatsu계의 Akopian 기술동작 분석. 한국운동역학회지 16(1):89–99.이순호, 송주호, 박종철((2012). 체조 도마 스카라트리플 기술 동작에 대한 사례 연구. 한국체육과학회지, 21(6), 1529-1539.
이 순호, 송 주호, 박 종철. 2012;체조 도마 스카라트리플 기술 동작에 대한 사례 연구. 한국체육과학회지 21(6):1529–1539.Abdel-Aziz, Y. I., & Karara, H. M. (1971). Direct linear transformation from comparator coordinates into object space coordinates in dose-range photogrammetry. Proceeding: The Symposium co Close RangeJan. 26-29, 1971, 1-8. Falls Church, VA:American Society of Photogrammetry.
Abdel-Aziz Y. I., et al, Karara H. M.. 1971. Direct linear transformation from comparator coordinates into object space coordinates in dose-range photogrammetry In : Proceeding: The Symposium co Close Range; Jan. 26-29, 1971; 1–8. Falls Church, VA:American Society of Photogrammetry. 10.14358/pers.81.2.103.F. I. G(Federation of International Gymnastics). (2013). Men's Artistic Gymnastics Code of Points.
F. I. G(Federation of International Gymnastics). 2013. Men's Artistic Gymnastics Code of PointsTakei, Y. (1998). Three-dimensional analysis of handspring with full turn vault: Deterministic model, coaches' beliefs, and judges' scores. Journal of Applied Biomechanics, 14, 190-210.
Takei Y.. 1998;Three-dimensional analysis of handspring with full turn vault: Deterministic model, coaches' beliefs, and judges' scores. Journal of Applied Biomechanics 14:190–210. 10.1123/jab.14.2.190.Takei, Y. (2007). The Roche Vault Performed by Elite Gymnasts: Somersaulting Technique, Deterministic Model and Judges' Scores. Journal of Applied Biomechanics, 23, 1-11.
Takei Y.. 2007;The Roche Vault Performed by Elite Gymnasts: Somersaulting Technique, Deterministic Model and Judges' Scores. Journal of Applied Biomechanics 23:1–11. 10.1123/jab.23.1.1.