3m 스프링보드 다이빙 109C형 기술의 점프 유형에 따른 근 활성도 및 운동학적 변인 분석
Analysis of muscle activity and kinematic variables according to jump type of 3m springboard diving 109C skill : case study
Article information
Abstract
목적
본 연구는 현재 우리나라 다이빙에서 가장 취약한 109C(Forward 4 ½ somersault) 기술(난이도 3.7)을 구사할 수 있는 국가대표 남자 대표선수 2명(KYN, YHR)을 대상으로 기술의 미흡한 부분을 보완하는데 목적이 있다.
방법
수행된 기술의 정성적 영상분석 측정을 위하여 고속카메라 3대를 이용하였고, 총 10부위에 EMG를 부착한 상태에서 두 선수에게 한발 점프와 두발 점프를 최소 세 번씩 실시하도록 지시하였다.
결과
연구결과, YHR, KYN은 두발 점프 후 기술 성공 시 P5구간에서 시간이 다시 증가하거나 같은 시간대가 나타났고, 점프 후 최고점까지의 변위는 기술 성공 시 더 높게 나타났다. YHR, KYN은 E2에서 어깨각과 엉덩이각이 기술 성공 시 더 크게 나타났고, KYN은 E1에서 엉덩이각이 더 커지는 경향을 보였다. 한발 점프의 경우 마지막 P5 구간에서 전 구간의 수행 시간과 비슷하거나 감소하는 경향이 나타났다. YHR은 기술 성공 시 E1에서 엉덩이각만 더 크게 나타났고, KYN의 경우 엉덩이각이 더 작게 나타났다. 근 활성도에서는 두 선수 모두 대부분의 근육에서 기술 실패 시 성공할 때보다 더 크게 나타났다.
결론
결론적으로 아직까지 두 선수 모두 기술 완성도가 부족하다고 판단되고, 효과적인 훈련 개선 방안을 통해 기술 및 체력 훈련의 보강이 필요할 것으로 사료된다.
Trans Abstract
Purpose
The purpose of this study is to overcome the shortcomings of 109C(Forward 4 ½ somersault) skill(Level 3.7) for two members of the men’s national diving team(YHR, KYN).
Methods
For qualitative analysis of the performed skill, three high-speed cameras and water-attached EMGs consisting of a total of ten placements were used. We instructed the two players to perform single-leg jump and double-leg jumps a total of three times each.
Results
The results of this study indicate that YHR and KYN appeared to increase their time or maintain the same time compared to the previous phase and displacement appeared higher when skill success occurred after the double-leg jump. The Shoulder & hip joints of YHR, KYN appeared larger in E2 and the hip joint of KYN appeared to increase in E1. Single-leg jump appeared similar or decreased the performed time of the previous phase in the last P5. YHR appeared larger only at a hip joint angle and KYN appeared smaller at the hip joint. The muscle activity(iEMG) of the two players appeared greater during skill failure than most of the muscles.
Conclusions
When perfectly performing 109C skills, the acquisition of medals in international competitions is possible. Therefore, in the future, it is necessary to study all of the variables that pertain to 109C.
서 론
다이빙은 플랫폼(platform)과 스프링보드(springboard) 다이빙 두 종류이며, 다이빙 시 회전은 6개 그룹(Forward, Backward, Reverse, Inward, Twist, Armstand)으로 구분되어진다. 또한 공중에서의 자세 유형에 따라 곧게 펴기형(straight), 반 구부리기형(pike), 완전 구부리기형(tuck)으로 세분된다(Lee, Park, Min & Moon, 2010).
다이빙경기에서 높은 점수를 받기위해서는 3가지의 공중자세(Straight, Pike, Tuck)에서 6개 그룹 동작을 완벽하게 수행하고 마무리 입수 동작도 깔끔하게 할 수 있어야 한다. 현재 우리나라 다이빙 대표팀에서 가장 메달 가능성이 높고 집중하고 있는 종목이 바로 3m 싱크로 스프링보드(3m synchronization springboard)종목이다. 이 종목은 두 선수가 동시에 다이빙을 실시하는 경기인 만큼 선수 각각의 다이빙 기술의 수행능력과 동작의 일치성을 평가하는 다이빙 종목이다(Lee et al., 2010).
현재 이 종목의 선수로 KYN(국민체육진흥공단)과 YHR(부산체고) 가 있다. 양 선수는 2015년 세계선수권 다이빙 남자 10m 싱크로 플랫폼 결승에서 6차시기 합계 421.80점을 받아 7위를 차지하였으며, 2014 인천아시안게임에서는 10m 싱크로 플랫폼, 3m 싱크로 스프링보드에서 은메달과 동메달을 획득하여 12년만의 아시안게임 메달을 획득하는데 기여하였다. 두 선수가 아시아 대회를 넘어 세계대회에서 좋은 성적을 거두기 위해서는 109C 기술과 같은 고난도 기술을 완벽하게 수행할 수 있어야 한다. 109C(난이도 3.7) 기술은 Forward 그룹에서 109B(난이도 4.1) 기술 다음으로 높은 기술이지만, 109C 기술의 성공여부가 대회 순위에 결정적인 영향을 미치기 때문에, 대부분의 대회에서 선수들은 109C 기술을 가장 많이 구사한다. 특히 109C 기술의 중요성을 알 수 있는 사례로 베이징에서 열린 2013 다이빙 월드컵 시리즈에서 런던 올림픽 3m 스프링보드 금메달리스트인 Zakharov는 마지막 시도에서 109C 기술을 실시하였지만 실패로 인해 74.10점을 받아 대회 3위를 하게 되었고, 멕시코에서 열린 2014 다이빙 월드컵 시리즈에서 독일의 Patrick선수는 109C 기술을 완벽하게 수행함으로써 100.7점을 받아 본인의 국제대회 첫 금메달을 획득하였다. 현재 우리나라에서 109C 기술을 구사할 수 있는 선수는 2명이며, 아직까지 기술에 대한 완성도가 높지 않아 세계 대회에서 좋은 성적을 내는데 부족하다. 따라서, 109C 기술을 구사할 수 있는 두 선수의 109C 기술 완성도를 높이는 지원이 시급하다.
일반적으로 다이빙 경기의 기본적인 기술은 시작 자세(starting position), 도약 동작(takeoff), 공중 동작(flight) 그리고 입수 동작(entry)으로 구분할 수 있다. 특히 다이빙의 진입 및 도약구간은 도약에 필요한 균형과 신체조절능력, 파워, 그리고 신체의 각운동량 등 역학적 변인을 효율적으로 활용하여 기술을 수행하여야 하는 스포츠이다. 그렇기 때문에 도약 후 선수는 회전을 스스로 통제할 수 없는 상황이므로 회전과 입수에 대한 가장 중요한 요소는 도약 순간에 결정된다고 할 수 있다(Kang& Nam, 2010). 이러한 다이빙 경기에서 도약하는 순간에 힘을 발현할 수 있는 기능 중 하나가 바로 근육의 활성도이다. 현 우리나라 남자 다이빙 대표팀 권경민 코치 역시 다이빙 시 고난이도 기술을 실시할 때 중요한 요소 중 하나가 바로 근 활성도라고 지적하였다. 이전 연구에서는 근육이 수축하는 동안 최대 힘이 증가하게 되면 근육으로부터 신경의 활성화 현상이 증가한다고 보고하였다(Narici, Roi, Landoni, Minetti, & Cerretelli, 1989; Toumi, Best, Martin, F’guyer, & Poumarat, 2004). 이는 근 파워를 발휘할 수 있는 점프 동작과 연관되어 근육이 수축하는 힘에 따라 엉덩이, 무릎, 발목 관절의 빠른 신전을 통해 점프의 높이가 결정되는 요소로서, 도약 시 빠른 신전이 일어나 점프의 높이가 확보된다면 근육 활성도를 통해 점프 후 회전 속도, 점프 높이 등 운동학적 변인에 많은 영향을 미칠 것으로 보고 있다(Bobbert, Gerritsen, Litjens, & Van Soest, 1996; Toumi et al., 2001; Kang, & Nam, 2010). 그러므로 점프 후 충분한 회전 모멘트를 얻을 수 있고 회전을 지속적으로 이어가기 위해서는 상체와 하체의 힘이 모두 발휘되어야 한다(Kim, & Youm, 2013). 도약 시 점프가 어떠한 형태와 높이로 수행되느냐에 따라 다음 동작이 결정되고 다음 동작의 운동량을 지속적으로 유지시키기 위해서 근육의 활성도 역할은 절대적이라고 할 수 있다.
본 연구는 현재우리나라에서 가장 취약한 종목 중 하나인 109C(Forward 4 ½ somersault) 기술(난이도 3.7)을 우리나라에서 유일하게 구사할 수 있는 국가대표 남자 대표선수 2명(KYN, YHR)을 대상으로 빠른 피드백을 통한 본 기술의 미흡한 부분을 보완하는데 목적이 있다. 이렇게 부족한 부분의 보완과 빠른 피드백을 위해 3D 동작 분석 보다는 2D 영상 분석을 통해 대표 팀에게 정보를 전달하는 것이 효율적이라고 판단하였다. 이전에 Walker, Sinclair, & Cobley(2015), Sanders & Gibson(2000) 연구에서도 다양한 기술들을 영상 분석으로 실시하여 종목의 특성을 고려해서 3D 모션 캡쳐 시스템 보다는 2D를 통한 정성적인 분석을 실시하였다. 또한, 두 가지 점프(한발 점프 후 두발 점프와 두발 점프 후 두발 점프) 종류에 따른 비교를 통해 실제 경기에서 실시하는 한발 점프를 높은 점프로 인한 가장 이상적인 자세가 나올 수 있는 두발 점프와 비교하여 기술의 운동학적 변인은 물론이고, 아직까지 어느 논문에서도 시도해 보지 않은 다이빙 시 근 활성도 측정을 통해 기술 성공과 실패 시 운동학적 변인들을 분석하여 다이빙 선수들의 경기력 향상에 도움을 줄 수 있는 기초자료를 제공하고자 한다.
연구방법
연구대상
본 연구는 다이빙 국가대표 남자선수 2명을 선정하여 연구의 특성상 사례 연구로 진행하였고, 선정된 대상은 사전에 개인정보 활용 동의서와 연구 참여 동의서에 서명을 한 대상자들로 하였다(Table 1).

Subjects information
측정방법
본 연구에서 사용될 실험 장비는 <Table 2>와 같다.

Measurement equipments
수행된 기술의 정성적 영상분석 측정을 위하여 고속카메라 3대를 이용하였고, 카메라의 위치는 좌우측 측면에서 도약과 공중동작으로 촬영하기 위한 카메라(cam 1, 2)를 배치하였고, 입수동작을 정밀하게 분석하기 위해 측면 카메라(cam 3)를 배치하고서 기술동작의 분석 및 평가를 <Figure 1>과 같이 실시하였다. 영상 분석은 dartfish 프로그램을 이용하여 스프링 보드 끝지점에 막대를 위치시켜 배율법으로 2차원 영상 분석을 하였다. 두 선수에게 ‘도약 전 한발 점프 후 두발 점프’와 ‘도약 전 두발 점프 후 두발 점프’를 최소 세 번씩 실시하도록 지시하였다(Figure 2, 3). 수행 후 전문가와 상의하여 성공과 실패를 구분하였지만 기술을 지속적으로 시도하였음에도 불구하고 세 번 연속 기술을 성공하지 못하였을 경우 실패한 데이터만을 가지고 분석을 하였다.

Camera Position
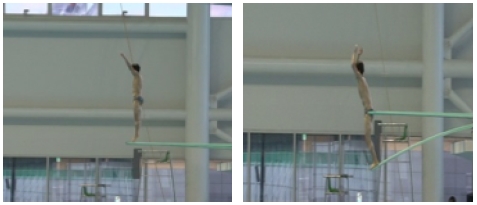
Double-leg jump after double-leg jump

Double-leg jump after single-leg jump
자료 처리
이벤트(Event)와 구간(Phase)
다이빙 시 운동학적 변인 분석 시 다음과 같은 이벤트와 구간을 설정하였다(Figure 4).
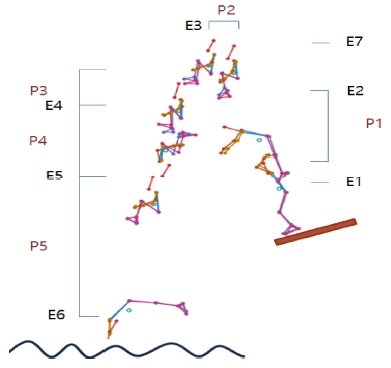
Event & Phase
E1: 도약(Take off: 두발이 스프링보드에서 떨어지는 순간)E2: 도약 후 첫 번째 회전이 끝나는 지점 E3: 도약 후 두 번째 회전이 끝나는 지점 E4: 도약 후 세 번째 회전이 끝나는 지점 E5: 도약 후 네 번째 회전이 끝나는 지점 E6: 입수(Entries: 신체의 일부가 수면과 접촉이 일어나는 순간) E7: Peak 지점(스프링보드에서 점프 후 배꼽의 수직 위치가 가장 높은 지점)P1: 도약 후 바퀴 중 첫 번째 회전 구간(E1∼E2)P2: 도약 후 바퀴 중 두 번째 회전 구간(E2∼E3)P3: 도약 후 바퀴 중 세 번째 회전 구간(E3∼E4)P4: 도약 후 바퀴 중 네 번째 회전 구간(E4 ∼E5)P5: 도약 후 바퀴 중 마지막 회전 구간(E5∼E6)
본 연구에서는 데이터 처리 시 속도와 이동 거리 데이터를 산출하기 위해 신체 중심의 위치를 정의하였다. 2D 영상 분석 특성상 3D 동작 분석과 달리 각 분절에 대한 상대적인 위치를 고려할 수 없기에 댄스 동작 시 몸의 회전을 배꼽(umbilicus)으로 정의한 선행 연구를 참조하였다(James et al., 2006). 또한, 회전의 시작과 끝은 선수의 얼굴을 기준으로 얼굴이 수평면과 수직을 이루고 있을 때를 시작으로 한 바퀴 회전 후 다시 얼굴이 수평면과 수직을 이룰 때까지로 정하였다.
자료 분석
본 연구의 종속 변인은 적분 근전도(Integrated electromyography), 도약 시 관절각도, 도약 후 높이, 속도, 회전 시간, 자세 변인(어깨각, 엉덩이각, 무릎각), 입수 시 관절 각도를 분석하였다.
적분 근전도
근전도 신호의 원 데이터(row data) 평균값을 구해 제로잉(zeroing)과정을 거친 후 대역 통과 필터(bandpass filter)를 20~500 Hz로 사용하였고, 증폭된 아날로그 근전도 신호는 아날로그-디지털 변환기에 의해 1000Hz의 비율로 샘플링하여 기록하였고, 전파 정류(rectification)를 시킨 다음, RMS(Root Mean Square)를 20ms로 설정하였다. 근수축시 동원된 모든 근육의 평균 적분근전도 측정값의 합을 100%로 간주한 후, 전체 근육에 대한 한 근육의 적분근전도 값을 퍼센트로 나타낸 것을 표준화하여 사용하였다. 피험자들에 대한 표준화(normalization)는 자발적 수축 기준(Reference voluntary contraction: RVC)으로 적용시켰다. 본 연구에서는 다이빙 동작 특성상 많이 사용하는 좌우 대퇴직근, 대퇴이두근, 비복근, 척추기립근, 우측 복직근의 근 활성도를 각각 분석하였다. 특히 하지의 EMG 부착 부위는 하지의 디딤발에서 일어나는 힘의 형태를 보기 위해 양쪽 하지에 모두 EMG를 부착하였다. 그리고 상지 복직근의 경우 우측에만 부착을 하였는데 동작 구현 시 양쪽 복직근에 EMG를 붙였을 경우 109C 기술 수행 시 선수들에게 방해 요소가 된다고 판단하여 우측 복직근에만 EMG를 부착하였다. 또한 EMG 특성상 EMG의 표면 전극이 물에 닿지 않게 하기 위해 의료용 방수테이프를 부착하였다. 분석 구간은 E1부터 E6까지의 구간으로 근 활성도를 분석하였다(Figure 5).

EMG Placement
자발적 수축 기준(RVC: Reference Voluntary Contraction)
근전도 신호를 기술에 따른 비교나 근육 간 비교를 하기 위해 표준화 과정이 필요하기 때문에 %RVC를 사용하여 표준화된 iEMG 데이터를 산출하였다. 본 연구에서는 기술을 실시하기 전에 피험자에게 양발을 지면에 20초간 지지하게 하여 전후 5초간의 데이터를 제외시키고 10초간의 데이터를 이용하여 %RVC로 각 근육의 근전도 신호를 표준화하였다.
운동학적 분석 정의
도약 거리는 보드에서 떨어져서 최고 도약 시까지의 변위 (도약 시 Toe ∼신체 중심의 Y축 최고 지점), 도약 속도는 보드에서 떨어져서 최고 도약 시까지의 속도로 정하였고, 회전시간은 tuck 기술을 구사하여 입수 전까지의 회전시간으로 정하였다. 또, 자세변인 중 어깨각(shoulder joint angle)은 도약, 입수 시 동체와 상완이 이루는 상대각[전상장골극(ASIS) ∼ 어깨(shoulder) ∼ 팔꿈치(elbow)]으로 하였고, 엉덩이각(hip joint angle)은 도약, 입수 시 동체와 대퇴가 이루는 상대각 [어깨(shoulder) ∼ 전상장골극(ASIS) ∼ 무릎(knee)], 무릎각(knee joint angle)은 도약, 입수 시 대퇴와 하퇴가 이루는 상대각[전상장골극(ASIS) ∼ 무릎(knee) ∼ 발목(ankle)]으로 정하였다. 어깨와 무릎의 관절각 위치 정의는 어깨는 견봉(acromion),무릎은 대퇴골(Femur)의 외측 상과(Lateral condyle)를 기준으로 정하였다.
연구결과
우리나라 남자 다이빙 대표팀은 109C형 기술을 훈련 시 점프 높이를 확보하여 회전 동작에 초점을 두었을 경우 도약 전 두발 점프 후 도약 시 두발 점프를 실시하였고, 실제 경기에서는 도약 전 한발 점프 후 도약 시 두발 점프를 실시하여 본 연구에서는 두 가지 경우를 모두 비교하였다.YHR의 경우 세 번씩 실시하였고, KYN의 경우 전문가들이 판단하기에 본인의 기술이 아니라고 판단하여 두 번씩 기술을 실시하였다. 또한 109C 기술 성공과 실패는 두 선수가 각각 기술을 수행한 후 3명의 전문가 회의를 거쳐 판단하였다.
두발 점프 기술 분석
회전시간, 변위 및 속도
두발 점프 109C형 기술은 성공한 경우와 실패한 경우를 비교하였을 때 두 선수 모두 각 회전마다 시간 차이는 크게 나타나지 않았지만 YHR은 기술 성공 시 P5(0.35 sec)구간에서 시간이 다시 증가하는 형태가 나타났다(Figure 6). 또한 점프 후 최고점까지의 변위는 기술 성공 시 더 높게 나타났으며, KYN 역시 기술 성공 시 P5(0.29 sec)구간에서 회전 시간이 실패했을 때보다 더 증가하였다. 최고점까지의 속도와 변위 역시도 기술 성공 시 더 크게 나타나는 특징이 있었다(Table 3).
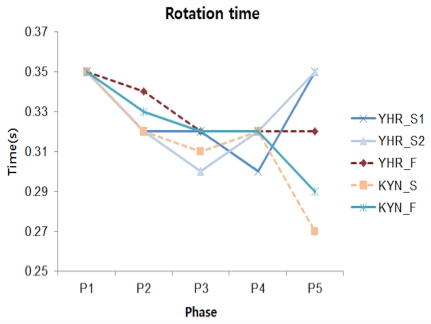
Rotation time during double-leg jump

Rotation time, displacement and velocity during double-leg jump
두발 점프 후 도약 및 입수 시 주요 관절각도 비교
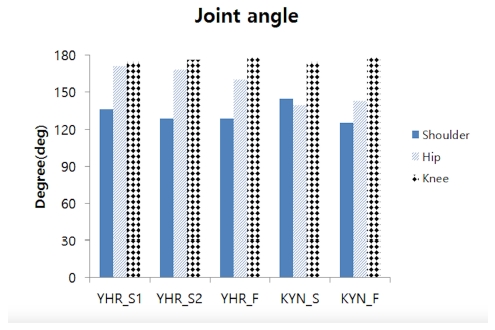
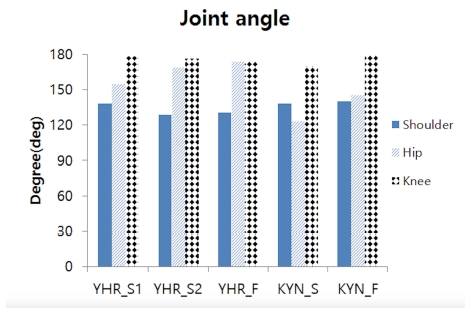
YHR은 E1에서 주요 관절각도에서는 큰 차이가 나타나지 않았지만 E2에서는 어깨각과 엉덩이각이 기술 성공 시 더 크게 나타났다. 반면 KYN은 기술 성공 시 E1에서 엉덩이각이 더 커지면서 동작을 수행하는 형태가 나타났으며, E2에서는 기술 실패했을 때보다 기술 성공 시 어깨각과 엉덩이각이 더 커지는 경향을 보였다(Figure 7, 8)(Table 4).
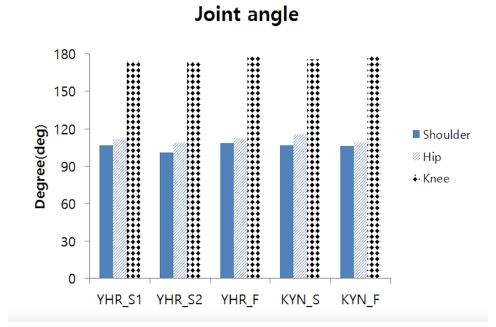
Joint angles at take off during double-leg jump
Joint angles at entires during double-leg jump

Joint angles at take off, and entires during double-leg jump
한발 점프 기술 분석
109C형 한발 점프는 세계적인 선수들도 구사하기 어려운 기술로서 KYN의 경우 기술 수행 동안 모든 시도를 실패하였다. 따라서 YHR의 기술 성공 시의 자료를 이용하여 두 선수 간의 기술 분석을 실시하였다.
회전시간, 변위 및 속도
109C형 한발 점프 기술 수행 시 두발 점프 수행 시간과 다르게 마지막 P5 구간은 전 구간의 수행 시간과 비슷하거나 감소하는 경향이 나타났다(Figure 9). YHR은 기술 성공 시 P5 구간은 P4 구간과 같은 시간이 나타났다. 반면 기술 실패의 경우 두 선수 모두 마지막 입수 전 회전인 P5 구간에서 성공 시간에 비해 회전 시간이 짧게 나타났다(Table 5).

Rotation time during single-leg jump

Rotation time, displacement and velocity during single-leg jump
도약 후 최고점까지의 이동변위를 살펴보면 YHR은 성공 시 3.99m, 실패 시 3.73m, 3.85m가 나타났으며, KYN은 실패 시 3.97m, 3.92m로 나타났다. 또한 이동속도에서는 YHR의 경우 기술 성공이 실패 보다 더 빠른 속도(5.67㎧)가 나타났으며, KYN의 경우 이동속도가 5.28㎧로 YHR이 기술을 성공할 때보다 0.39㎧ 더 느리게 나타났다.
한발 점프 후 도약 및 입수 시 주요 관절각도 비교
YHR은 성공 시 E1에서 엉덩이각이 더 크게 나타났지만 어깨각과 무릎각에서는 큰 차이가 나타나지는 않았다. E2에서는 기술 성공 시 어깨각이 더 크게 나타났으며, 엉덩이각은 오히려 작게 나타나는 패턴을 보였다. 반면 KYN의 경우 E1에서 기술 YHR과 비교해 보면 엉덩이각이 더작게 나타났으며, E2에서 어깨각은 유사한 패턴을 보였으나 무릎각과 엉덩이각은 작게 나타났다(Figure 10, 11)(Table 6).

Joint angles at take off during single-leg jump
Joint angles at entires during single-leg jump

Joint angles at take off, and entires during single-leg jump
109C형 기술 수행의 근 활성도(iEMG) 비교
위의 <Table 7>과 같이 기술 수행 시 사용되는 주요 근육의 활성도를 비교하였다. YHR의 좌측 근육의 경우 모든 점프에서 기술 실패하였을 때 성공하였을 때보다 대퇴직근과 비복근, 척추 기립근의 활성도가 더 크게 나타났고, 우측 근육의 경우 두발 점프에서는 우측 척추 기립근을 제외한 나머지 우측 근육에서 기술 실패하였을 때 더 큰 활성도가 나타났다. 또한 한발 점프에서는 기술 성공 시 실패했을 때보다 대퇴직근, 대퇴이두근, 비복근, 복직근에서 더 큰 활성도가 나타났다. KYN의 경우 좌우대퇴사두근, 좌측 대퇴이두근, 우측 비복근, 복직근이 두발 점프 기술이 실패하였을 때 더 큰 활성도가 나타났고, 한발 점프의 경우 두발 점프 성공 시와 비교하였을 때 좌우 대퇴직근, 우측 대퇴이두근, 우측 비복근에서 더 큰 근 활성도가 나타났다.

Normalized average iEMG between double-leg and single-leg jumps
논 의
이 연구에서는 대한민국 남자 다이빙 국가대표 주요 선수를 대상으로 109C형 기술 수행 시 나타나는 운동학적 변인과 근전도를 통해 미흡한 부분을 보완하여 기술 완성도를 높여줌으로써 최적의 경기력을 발휘할 수 있도록 도움을 주는데 있다. 두발 점프 후 109C형 기술을 수행한 경우 YHR의 근육 활성도에서 기술 성공 시 실패했을 때보다 척추기립근을 제외하고는 모든 근육에서 더 적은 활성도가 나타났다. 이는 도약 전 두 번의 점프에서 스프링보드의 탄성에너지를 충분히 이용한 상태로 도약에 들어갔기 때문에 큰 탄력을 받게 됨으로써 근육에 부담을 주지 않아 회전 동작에서도 큰 힘을 들이지 않고 빠른 회전을 할 수 있었던 것으로 판단된다. 이를 통해 도약 후 점프의 변위와 속도에서도 더 높게 나타났고, 결국 입수 구간에서 회전을 할 수 있는 시간이 증가하는 것으로 나타났다. Subbaiah, & Arnoid(1982)와 Koschorreck & Mombaur(2012)는 다이빙 선수가 스프링보드에서 도약하는 순간의 신체 중심 속도와 높이는 체공 시간에 영향을 주어 공중 회전 수와 안정적인 입수 동작을 효율적으로 수행할 수 있다고 보고하여 큰 힘을 들이지 않고 빠른 회전을 통해 안정된 입수 동작을 수행할 수 있다는 주장을 뒷받침해준다. 이러한 긴 체공시간으로 인해 입수 시 어깨관절과 엉덩이 관절을 신전시킬 수 있는 시간을 제공하여 수직방향으로 입수하는 가장 이상적인 자세가 나타난 것으로 판단된다.
KYN의 경우 기술 성공 시 실패할 때와 비교하여 우측 척추기립근과 대퇴이두근을 제외하고는 모든 근육에서 작은 활성도가 나타났다. 이는 YHR과 마찬가지로 도약 전 점프 시 스프링보드에서 충분한 탄력을 받아 도약 시부터 입수 때까지 영향을 주어 근육의 큰 활성도 없이도 높은 점프를 할 수 있었다. 그로 인해 도약 시 엉덩이각이 커지고 최고점까지의 변위와 속도는 더 높게 나온 것으로 판단된다.
그 결과 입수 시 어깨각이 더 크게 나타나면서 실패했을 때보다 안정된 입수자세로 나타났다. 하지만 올바른 입수 자세는 입수의 충격이 발생하면서 선수의 상해를 예방하기 위해 몸 펴기(come-out) 동작이 이루어져야 한다(Lee et al., 2010). KYN은 109C형 기술이 본인의 기술로서 아직까지는 완벽한 숙달이 되지 않아 기술 실패 시보다 안정된 자세가 나왔지만 YHR보다 몸 펴기 동작이 제대로 이루어지지 않아 완벽한 입수 자세는 나오지는 않은 것으로 판단된다.
실제 다이빙 경기에서 선수들은 도약 전 한발 점프 후 두발 점프를 하게 되는데 한발 점프는 도약 전에 최대한의 점프를 위한 힘이 두발점프보다 완벽하게 전달되지 않기 때문에 부족한 높이로 인한 회전을 구사할 시간이 부족하다. YHR의 경우 기술 성공 시 실패했을 때보다 좌측 근육의 경우 대퇴이두근을 제외한 나머지 근육인 대퇴사두근과 비복근, 척추기립근의 활성도가 더 적게 나타났고, 우측의 경우 척추기립근을 제외한 나머지 근육에서 더 크게 나타났다. 이는 도약 전 체중을 실은 상태에서 한발로 점프를 한 다음 두발로 마지막 점프 동작이 이루어지기 때문에 한발로 점프했을 때 근육에 대한 영향이 입수 시까지 영향을 미친 것으로 보인다. 특히 우측 대퇴사두근과 비복근을 사용하면서 최대한 수직 방향으로 높게 뛰어오르려는 경향이 나타났다. 이는 한발 점프로 인해 근육을 훨씬 강하게 동원시켜 높게 오르려는 형태인 것으로 보인다. 또한 도약 시 어깨각과 엉덩이각이 기술 실패했을 때보다 더 크게 나타났는데 도약 시 엉덩이각이 크게 나타난 것은 신체를 수직 방향으로 하여금 최고점까지 높은 위치로 확보하려는 전략이다(Lee, So & Lim, 2006). 그렇기 때문에 최대한 수직 방향으로 올라가기 위한 동작으로 판단되고, 기술 실패 시에는 어깨각과 엉덩이각이 더 작게 나타나 수직 방향 보다는 전방으로의 움직임이 일어나는 것으로 최고점까지의 변위와 속도에서 확연한 차이가 나타난 것으로 보인다. 또한 기술 성공 시 마지막 반 바퀴 시간은 전 구간과 동일한 시간이 나타났지만 기술 실패 시에는 회전 시간이 전 구간 보다 감소하는 경향이 나타났다. 이러한 결과를 통해 실패 시에는 어깨와 엉덩이각을 작게 하여 빠른 회전력을 구사하려고 하였지만 오히려 큰 차이가 나타나지 않았으며, 이는 최고점까지의 속도와 변위를 확보하지 못하면서 충분한 체공 시간을 가지지 못한 결과로 이어진 것으로 보인다. Song & Park(2015)는 착지 동작에서 신체가 앞으로 쏠리는 현상이 나타날 경우 전방으로의 수평 움직임이 더 많이 일어나 이후 동작에서는 불안정한 자세로 이어진다고 하였다. 그렇기 때문에 마지막 입수 구간에는 어깨관절을 충분히 신전시키지 못하고 전방으로 이동하면서 불안정한 입수 동작이 이루어진 것으로 판단된다. KYN의 경우 한발점프 후 109C형 기술을 성공하지 못하여 YHR의 기술 성공 시의 자료와 비교하였다. KYN은 YHR이 기술 실패했을 때와 마찬가지로 도약 시 어깨와 엉덩이각을 작게 해준 상태에서 점프하여 전방으로 움직이는 동작이 나타났고, 이로 인해 최고점까지의 변위와 속도 역시 감소하게 나타나 4 바퀴까지의 회전 속도는 기술 성공과 비교하여 느리게 나타났을 뿐만 아니라 마지막 반 바퀴에서도 부족한 시간으로 인해 신체를 신전시키지 못한 상태에서 입수가 진행되었다. 결국 마지막 구간에서의 부족한 시간으로 인해 엉덩이와 무릎각이 신전되지 않은 상태에서 입수를 한 것으로 판단된다. 또한 한발 점프와 두발 점프의 기술 실패했을 경우 지속적으로 엉덩이 관절을 신전시키지 못한 상태에서 입수를 하는 경우가 나타나는데, Joseph & Carolyn(1994)는 허리를 신전시키는데 척추기립근이 중요한 역할을 한다고 보고하였다. KYN은 이러한 힘이 아직까지 부족하기 때문에 마지막 구간에서 허리를 충분히 신전시키지 못하고 입수를 하는 것으로 판단된다.
훈련 개선 방안
본 연구에서 연구된 109C형 기술의 분석 결과를 토대로 전문가 회의를 통해 다음과 같은 훈련 개선 방안을 도출하였다.
기술훈련 보강
YHR과 KYN의 109C형(4½회전) 기술을 분석한 결과 다음과 같은 선수들의 장단점을 도출하였다. 두 선수가 109C형 기술의 높은 점수를 획득하기 위해서는 첫째, 기술수행에서 점프와 입수 시의 어깨관절의 가동범위를 180도 유지시킬 수 있어야 한다. 둘째, 스프링보드에서 보드의 탄성에너지를 높게 하여 최대의 도약높이를 얻어야 할 것이며, 셋째, 도약 시 스프링보드를 리듬감과 강하게 누르는 힘이 필요할 것이다. 넷째, 스프링보드에서 도약 이후 몸을 최대한 굴곡 시켜 관성모멘트를 적게 받아 회전력을 높여주어야 할 것이며, 마지막으로 입수 전 반 바퀴째 자신의 신체를 최대한 신전시켜 관성모멘트를 증대하여 회전속도를 제어할 수 있는 능력이 필요할 것으로 사료된다. 따라서 이러한 기술적 요인들을 개선하기 위한 체력훈련 보강방법으로 다음과 같이 제안한다.
체력훈련 보강
유연성 강화
도약과 입수 시 몸을 곧게 유지하는데 어깨굴곡동작의 가동범위는 상당히 중요한 작용을 하게 된다. 이러한 관점에서 다이빙의 경기력(자세유지)을 높이기 위해서는 최대가동범위인 180도 수준으로 증가시켜야 할 것으로 사료된다. 어깨굴곡관절의 가동범위를 증가시키기 위한 방법으로 잠재적인 과활동 근육(광배근, 대흉근, 소흉근, 오훼완근, 대원근)의 이완과 잠재적인 저활동 근육(중간/아래 승모근, 능형근, 후방삼각근, 회전근개)의 강화운동프로그램으로 예를 들면, 폼롤러 활용 자가근막 이완법과 같은 운동이 필요할 것으로 판단된다.
코어 강화
다이빙에서 점프 후 엉덩이 관절을 최대한 빨리 굴곡 시켜 빠른 회전동작과 입수 시 최대한 몸을 신전시키기 위해서는 코어부위의 근력이 중요한 역할을 담당한다. 그러므로 메디신볼 운동, 볼 크런치 운동으로 코어 강화 훈련을 실시한다.
하체 강화
다이빙에서 하체의 파워 증가는 도약 시 체공시간을 높이는데 결정적 역할을 담당한다. 그러므로 무거운 중량을 통한 운동 혹은 플라이오 메트릭 훈련을 통해 하체의 근 파워를 증가시킨다.
리듬 강화
다이빙 스프링보드는 탄성을 가진 판으로 선수가 한발로 강하게 보드 판을 눌러 도약하는 과정에 선수의 협응성은 주요한 요인으로 작용된다. 다이빙보드에서의 리듬과 같은 방식의 메트로놈 박자를 맞춰 훈련을 한다면 신체의 협응력을 높이는데 효과적일 것이다.
결론 및 제언
스프링보드다이빙 109C형 동작을 근전도와 2차원 영상분석을 통해 도약에서부터 입수 때까지의 근 활성도를 측정하였고, 도약과 입수 시 주요 관절 각도와 도약 시부터 최고점까지의 변위 및 속도, 입수 때까지의 회전 시간을 분석하여 다음과 같은 결론을 얻었다.
첫째, 109C형 두발 점프의 기술 성공 시 대부분의 근육의 활성도가 기술 실패 시보다 적게 나오면서 도약 후 최고점까지 변위와 속도를 증가시킬 수 있는 힘을 가지게 되었고, 결국 마지막 반 바퀴에서 안정된 입수 동작을 수행할 수 있었다. 하지만 기술 실패 시 최고점까지 변위와 속도가 부족하면서 기술 성공 시보다 근육에 힘이 들어가 2바퀴째부터 회전 속도가 느려지기 시작했고 마지막 입수 동작에서 어깨와 엉덩이각이 작아지면서 불안정한 입수 동작이 나타났다. KYN의 경우도 YHR과 마찬가지로 기술 성공 시 대부분의 근육 활성도가 적게 나타나 스프링보드에서의 탄성에너지를 전달 받았고, 도약 시 엉덩이각이 커지므로 최고점까지의 변위와 속도는 더 높게 나타나 회전 속도를 증가시키면서 완벽하지는 않지만 비교적 성공적인 입수 동작을 수행하였다. 하지만 기술 성공 시에도 불완전한 입수 동작이 나타나 꾸준한 연습을 통해 본인의 기술로서 수행을 해야 할 것으로 판단된다.
둘째, 109C형 한발 점프에서 YHR은 기술 성공 시에 기술을 실패했을 때 보다 근 활성도가 적게 나왔고 이를 통해 도약 후 최고점까지 변위와 속도를 최대한 증가시켜 두발 점프와 비슷한 수치가 나타났다. 결국 마지막 반 바퀴 구간에서 전구간과 같은 회전 시간대가 나타나 이상적인 입수 자세가 나타났다. 기술 실패 시에는 도약 후 최고점까지의 변위와 속도가 기술 성공 시보다 부족하여 입수 때까지 영향을 미쳤다. KYN은 YHR의 기술 성공 데이터와 비교하여 도약에서부터 입수 때까지 이미 대부분의 근육에서 근 활성도가 높게 나타났으며 그로 인해 도약 후 최고점까지의 속도가 느려졌다. 이에 따른 느린 회전으로 인해 마지막 반 바퀴에 안정된 입수 동작을 취할 수 있는 시간이 부족하였으며, 엉덩이 관절이 많이 작게 나타나 신체가 수평인 상태에서 입수를 하는 형태가 나타났다.
현재 109C형 기술은 가장 난이도가 높은 기술 중 하나로 우리나라는 물론이고 세계적으로도 이 기술을 완벽히 수행하는 선수가 적어 많은 피험자를 대상으로 연구를 하기 어려웠다. 하지만 109C형 기술을 완벽하게 소화할 경우 국제 대회에서 메달 권에 근접할 수 있기 때문에 109C형 기술 연구를 통해 선수들이 국제 경기에서 입상할 수 있도록 지금보다 다양한 변인들로 연구가 필요할 것이다.
References
Bobbert, M. F., Gerritsen, K.G., Litjens, M. C., & Van Soest, A. J. (1996). Why is counter movement jump height greater than squat jump height?. Medicine and science in sports and exercise, 28, 1402-1412.
10.1097/00005768-199611000-00009.James, J., Ingalls, T., Qian, G., Olsen, L., Whiteley, D., Wong, S., & Rikakis, T. (2006). Movement-based interactive dance performance. In Proceedings of the 14th ACM international conference on Multimedia, 470-480.
10.1145/1180639.1180733.Joseph Ng, & Carolyn Richardson(1994). EMG study of erector spinae and multifidus in two isometric back extension exercises. Australian Journal of Physiotherapy. 40(2), 115–121.
10.1016/S0004-9514(14)60458-X.Kang. M. K., & Nam. S. W. (2010).Kinematic analysis of 303(B) take-off in platform dives. Korean journal of sport science, 16, 41-50.
Kim. H. S., & Moon. Y. J.(2003). The Effect of Springboard position Variance on the Forward Dive Pike(101B) Flight Height in Diving. Korean journal of sport science, 42(6), 953-962.
Kim. T. H., & Youm. C. H.(2013). Effects of Knee Joint Muscle Fatigue and Overweight on the Angular Displacement and Moment of the Lower Limb Joints during Landing. Korean journal of sport biomechanics, 23(1), 63-76.
10.5103/KJSB.2013.23.1.063.Korea Institute of Sport Science (2011). Sports Leadership Training Guidebook-Diving. Seoul: Korea Institute of Sport Science.
Koschorreck, J., & Mombaur, K. (2012). Modeling and optimal control of human platform diving with somersaults and twists. Optimization and Engineering, 13, 29-56.
10.1007/s11081-011-9169-8.Lee. J. H. (2006). A Kinematics Analysis of Inward 1½ Somersault in Platform dives. Korean journal of sport biomechanics, 16(1), 139-149.
10.5103/KJSB.2006.16.1.139.Lee. J. H, So. J. M,, & Lim.Y. T. (2006). A Kinematics Analysis of Back Armstand 2 Somersault in Platform Dives a Case Study. Korean journal of sport biomechanics, 16(4), 13-20.
10.5103/KJSB.2006.16.4.013.Lee. J. K., Park. Y. H. Min. S.H., & Moon. Y. J. (2010). Physical director training instruction : diving. Korea institute of sport science.
Marius Sommer & Louise Rönnqvist (2009). Improved motor-timing : effects of synchronized metronome training on golf shot accuracy. Journal of Sports Science and Medicine. 8, 648-656.
McCormick, J. H., Subbaiah, P., Arnold, H. J. (1982). A method for identification of some components of judging spring board diving. Research Quarterly for Exercise and Sport, 53, 313-322.
10.1080/02701367.1982.10605254.Michael A. Clark & Scott C.Lucett (2014). NASM’s Essentials of Sports Performance Training. Jones & Bartlett Learning, LLC.
Narici, M. V., Roi, G. S., Landoni, L., Minetti, A. E., & Cerretelli, P. (1989). Changes in force, cross-sectional area and neural activation during strength training and detraining of the human quadriceps. European journal of applied physiology and occupational physiology, 59(4), 310-319.
10.1007/BF02388334.Sanders, R. H., & Gibson,B. J. (2000). Technique and timing in the womens forward two and one half somersault pike and mens three and one half somersault pike 3m spring board dives. Journal of Science and Medicine in Sport, 3(4), 434-448.
10.1016/S1440-2440(00)80009-2.Song. J. H., & Park. J. H. (2015).The Kinematic Analysis of Tsukahara Stretched with 7/2 Turn (YANG Hak Seon 2)in Vault. Korean journal of sport science, 26(2), 413-429.
10.24985/kjss.2015.26.2.413.Toumi, H., Best, T. M., Martin, A., F'guyer, S., & Poumarat, G. (2004). Effects of eccentric phase velocity of plyometric training on the vertical jump. International Journal of sports medicine, 25(5), 391-398.
10.1055/s-2004-815843.Toumi, H., Thiery, C., Maitre,S., Martin, A., Vanneuville, G., & Poumarat, G. (2001). Training effects of amortization phase with eccentric/concentric variations—the vertical jump. International journal of sports medicine, 22(8), 605-610.
10.1055/s-2001-18525.Walker, C. A., Sinclair, P. J., & Cobley, S. (2016,May). A KINEMATIC ANALYSIS OF THE BACKWARD 2.5 SOMERSAULTS WITH 1.5 TWISTS DIVE(5253B) FROM THE 3M SPRINGBOARD. In ISBS-Conference Proceedings Archive, 1(1).